Dear Bloggers,
The ‘We Do Lego Program’ is used at GEPS by Years 3 and 4 and I have been thrilled the way students have embraced, loved and learnt so much from it.
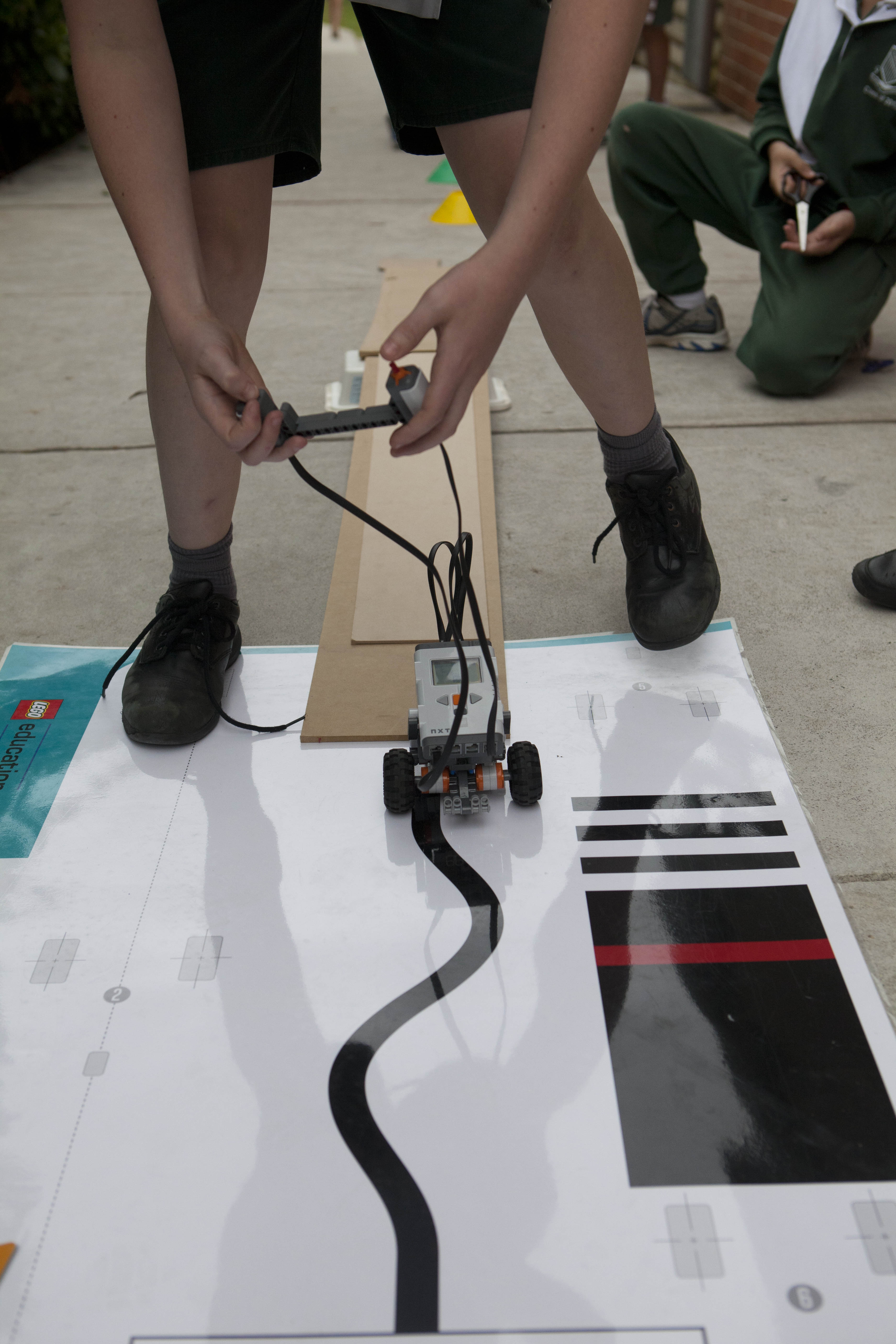
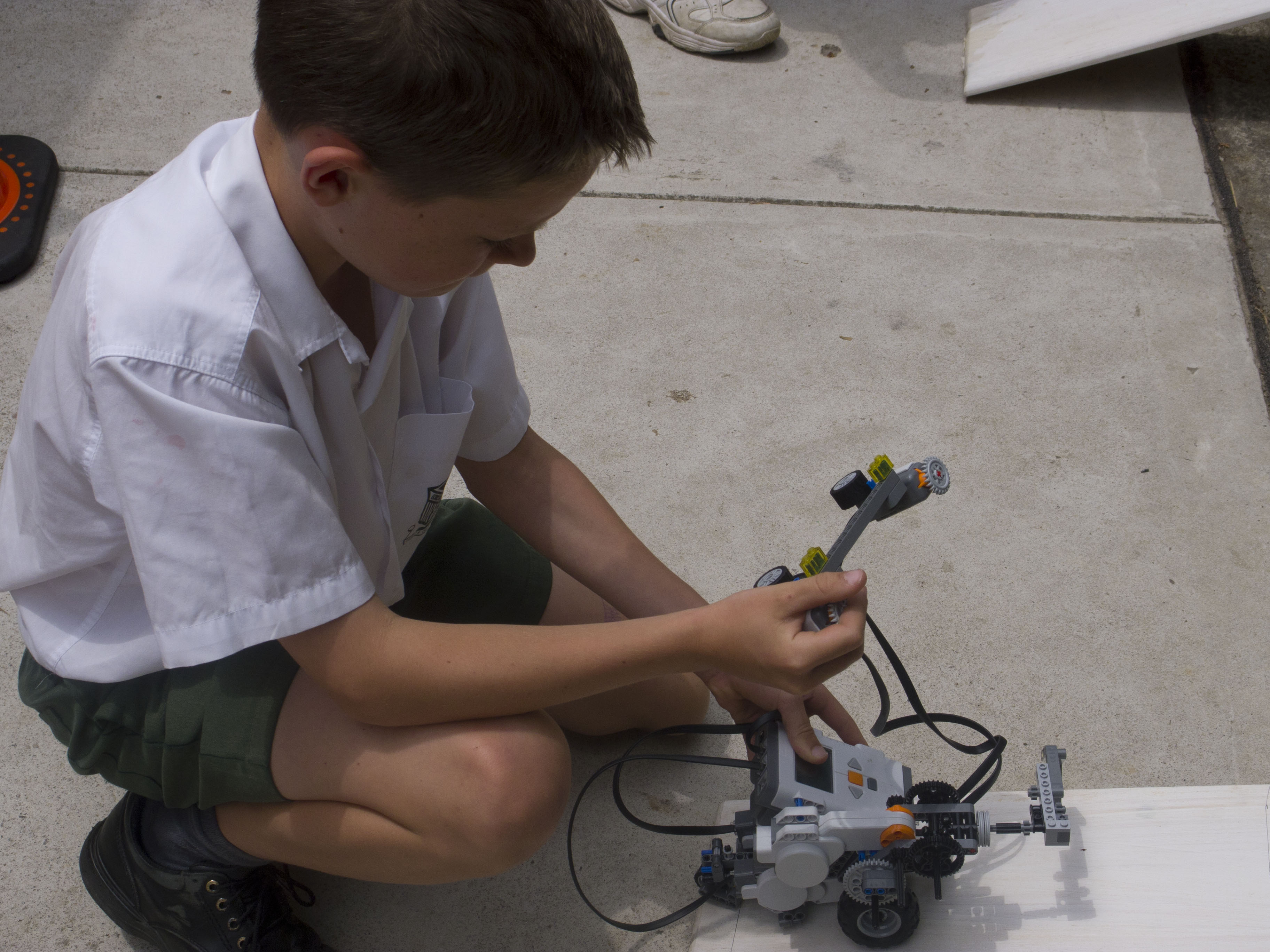
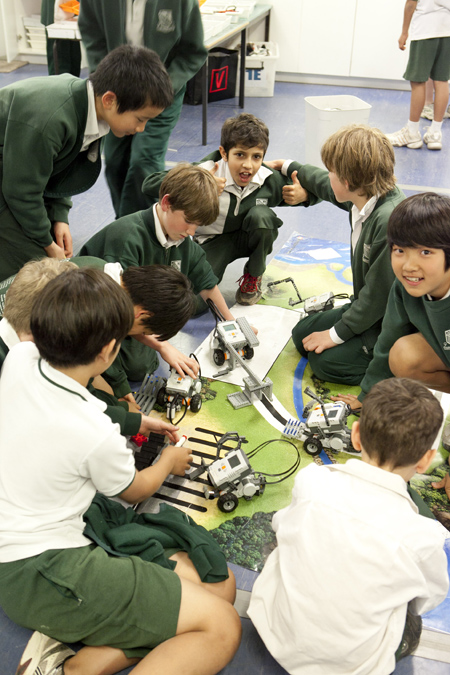
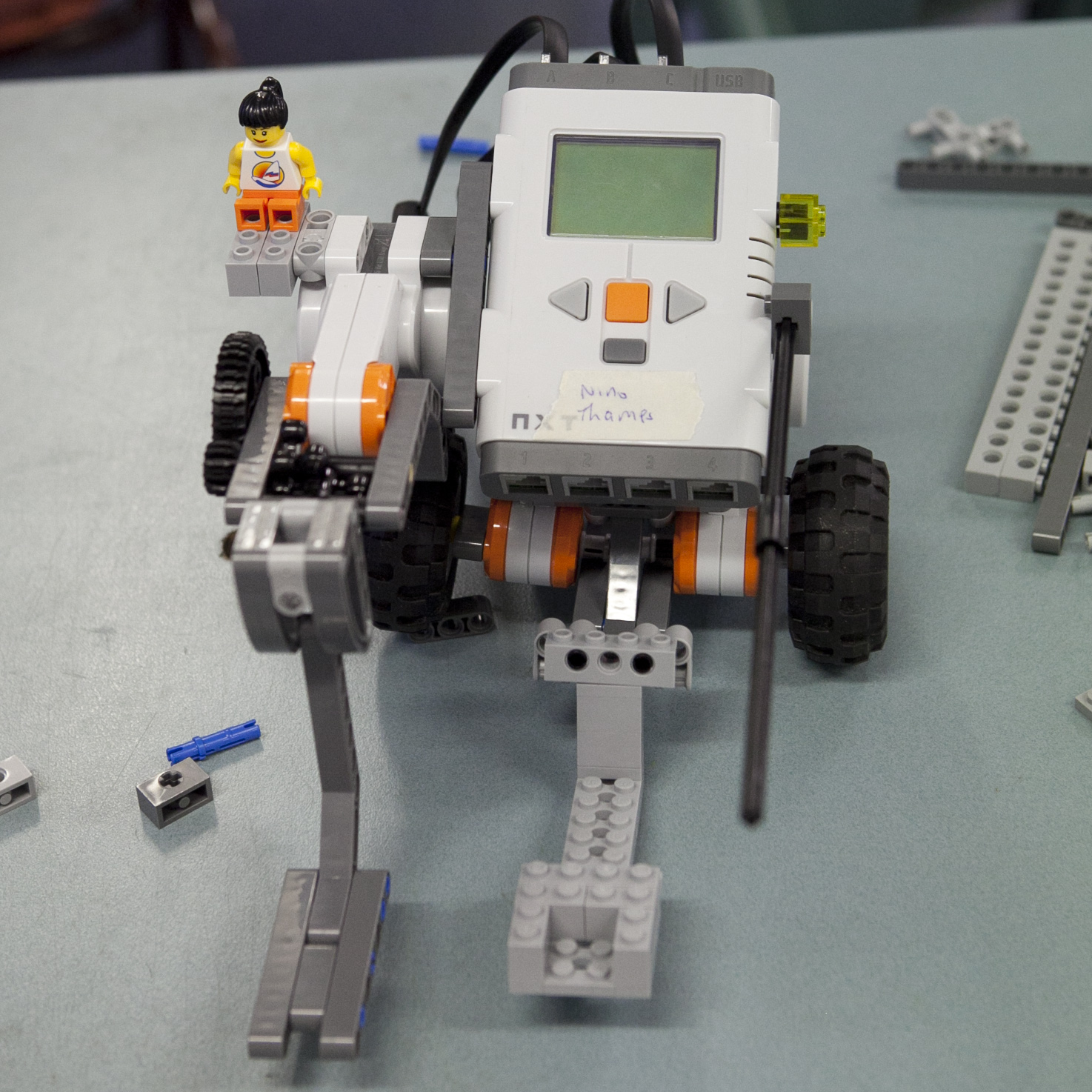
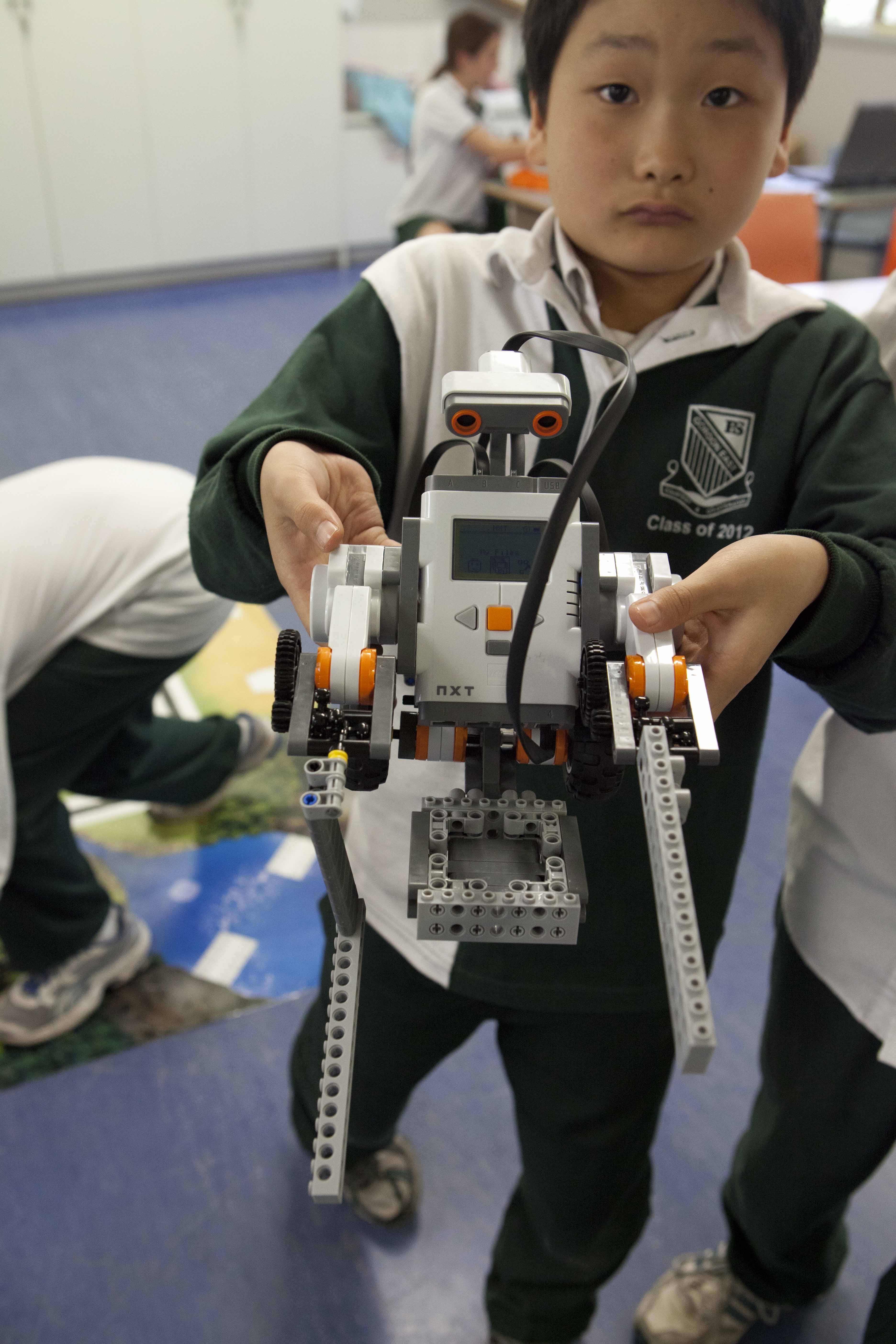
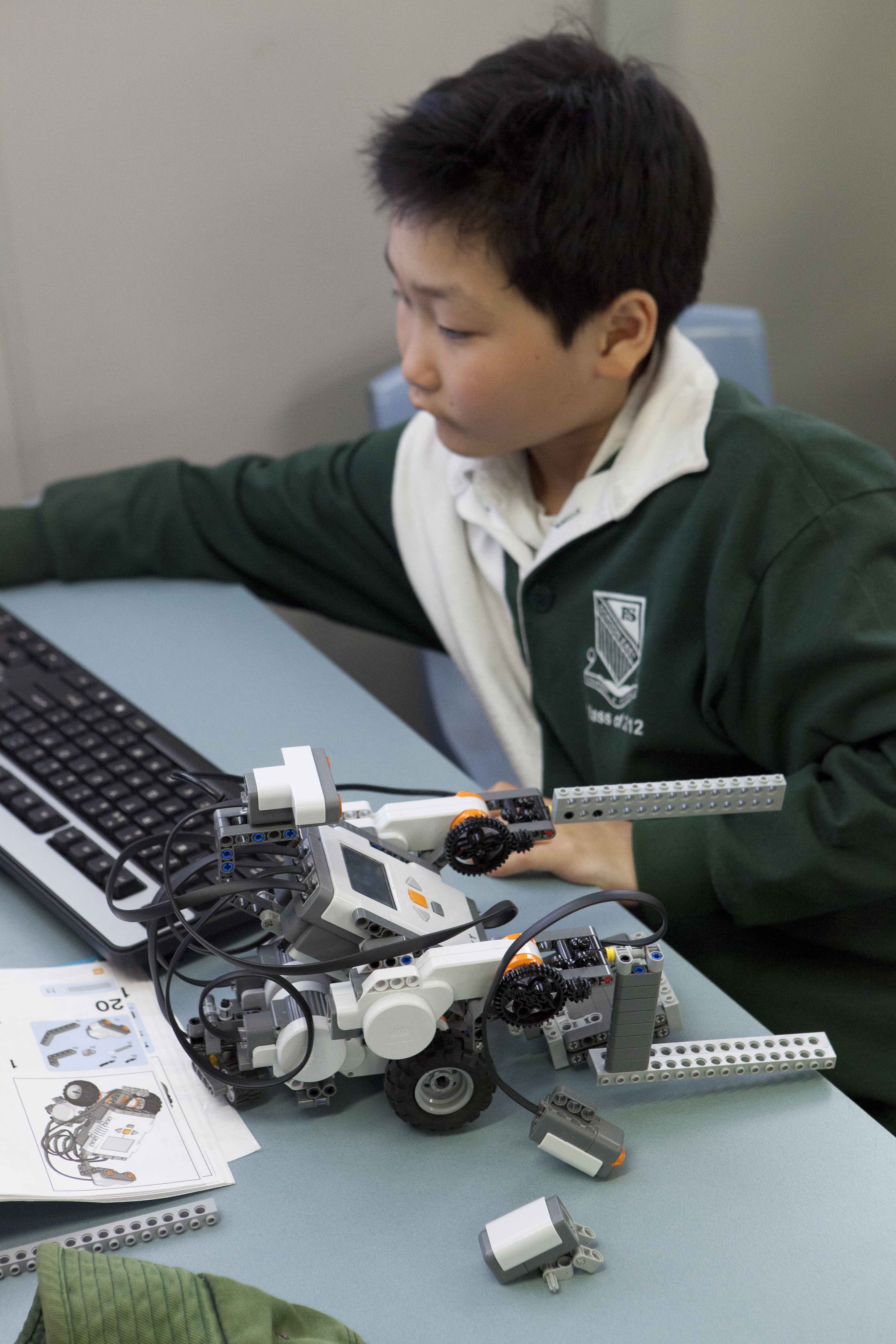
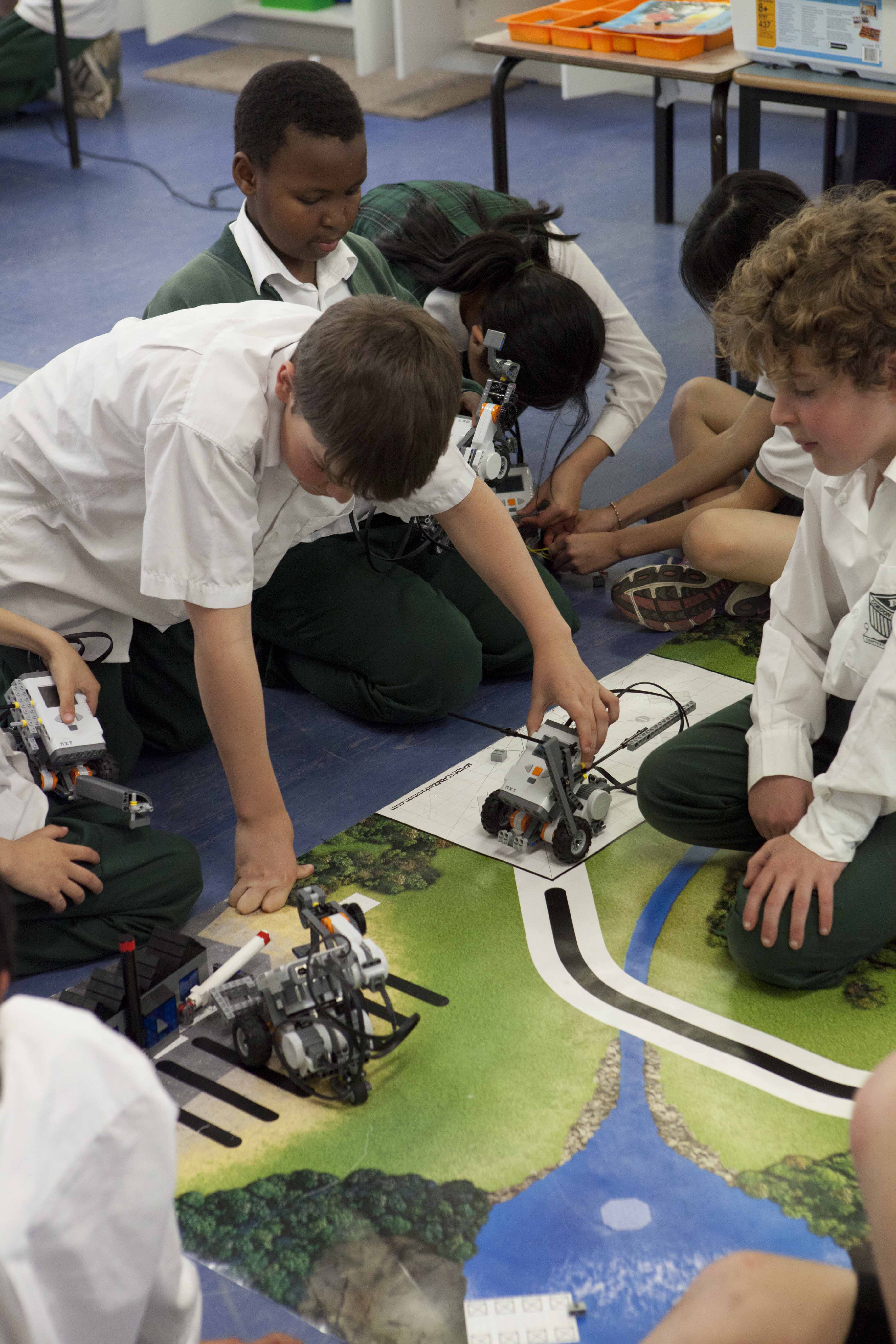
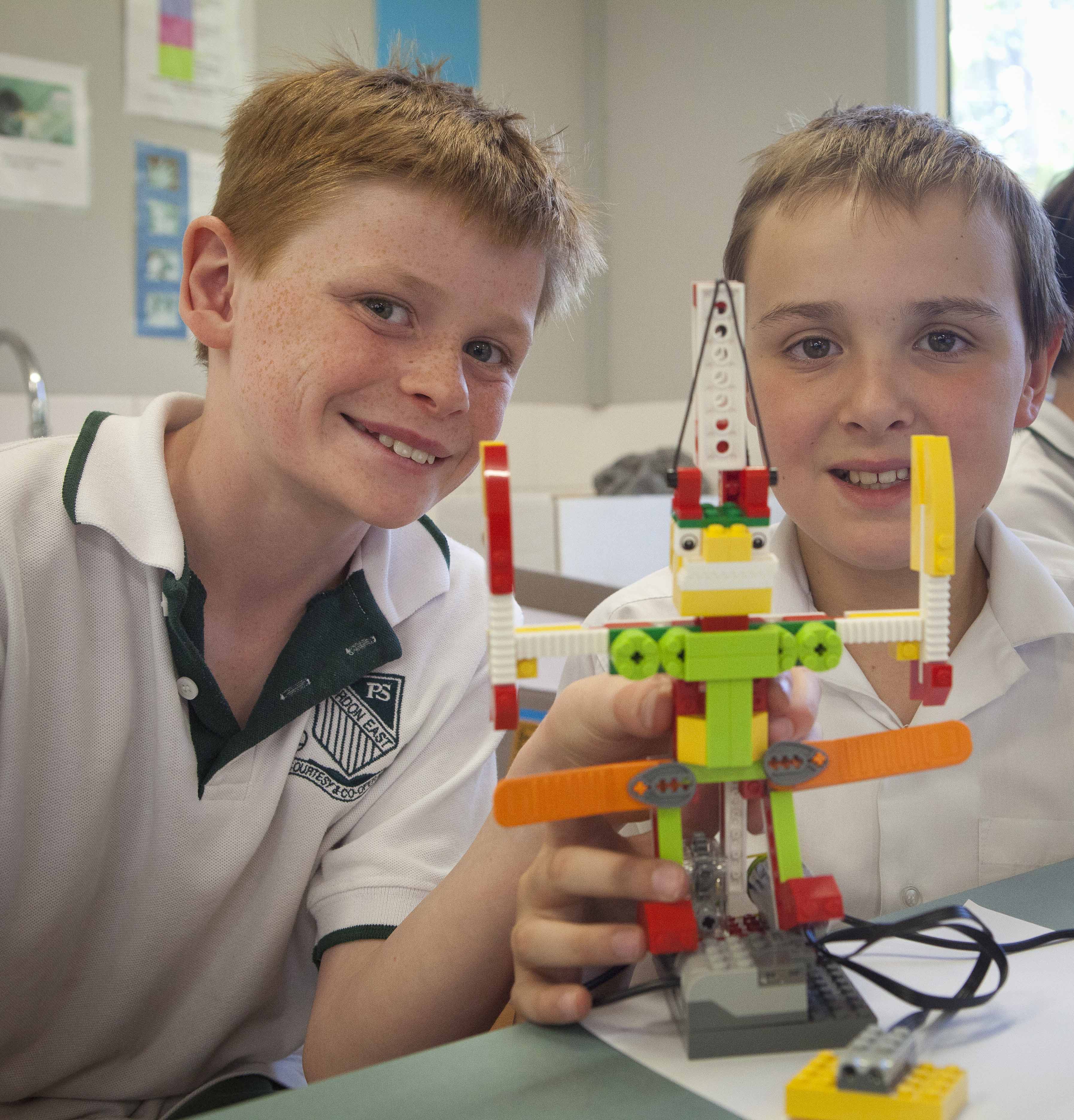
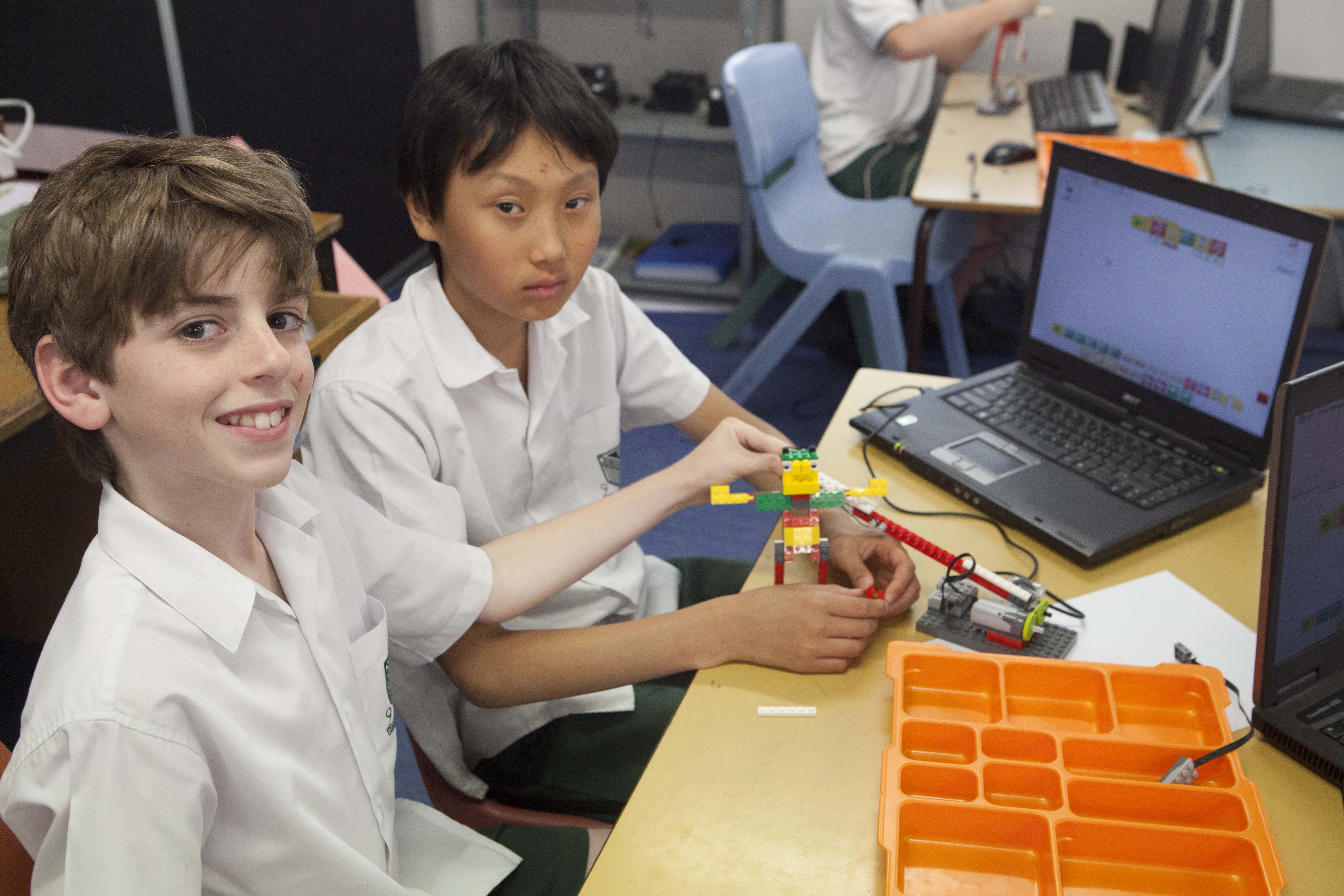
This Year’s 5 and 6 have not used it as they are using the more advanced NXT system. I wanted them to have just a little taste of the’ We Do’ so I set them an advanced challenge and saw what they came up with.
Have a look for yourself.
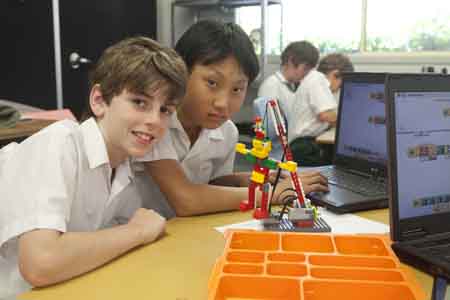
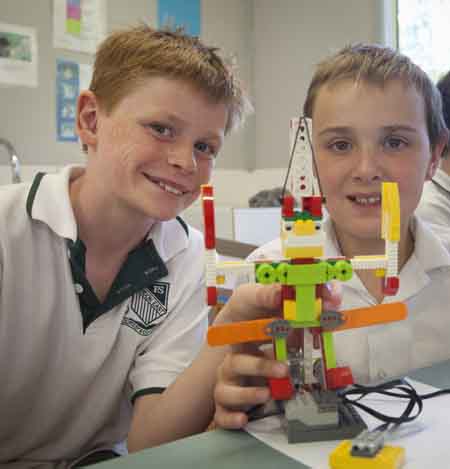

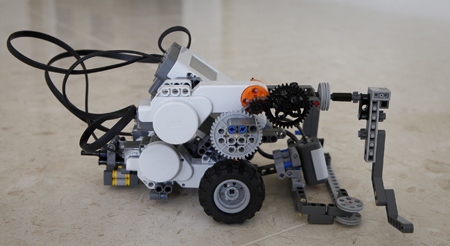
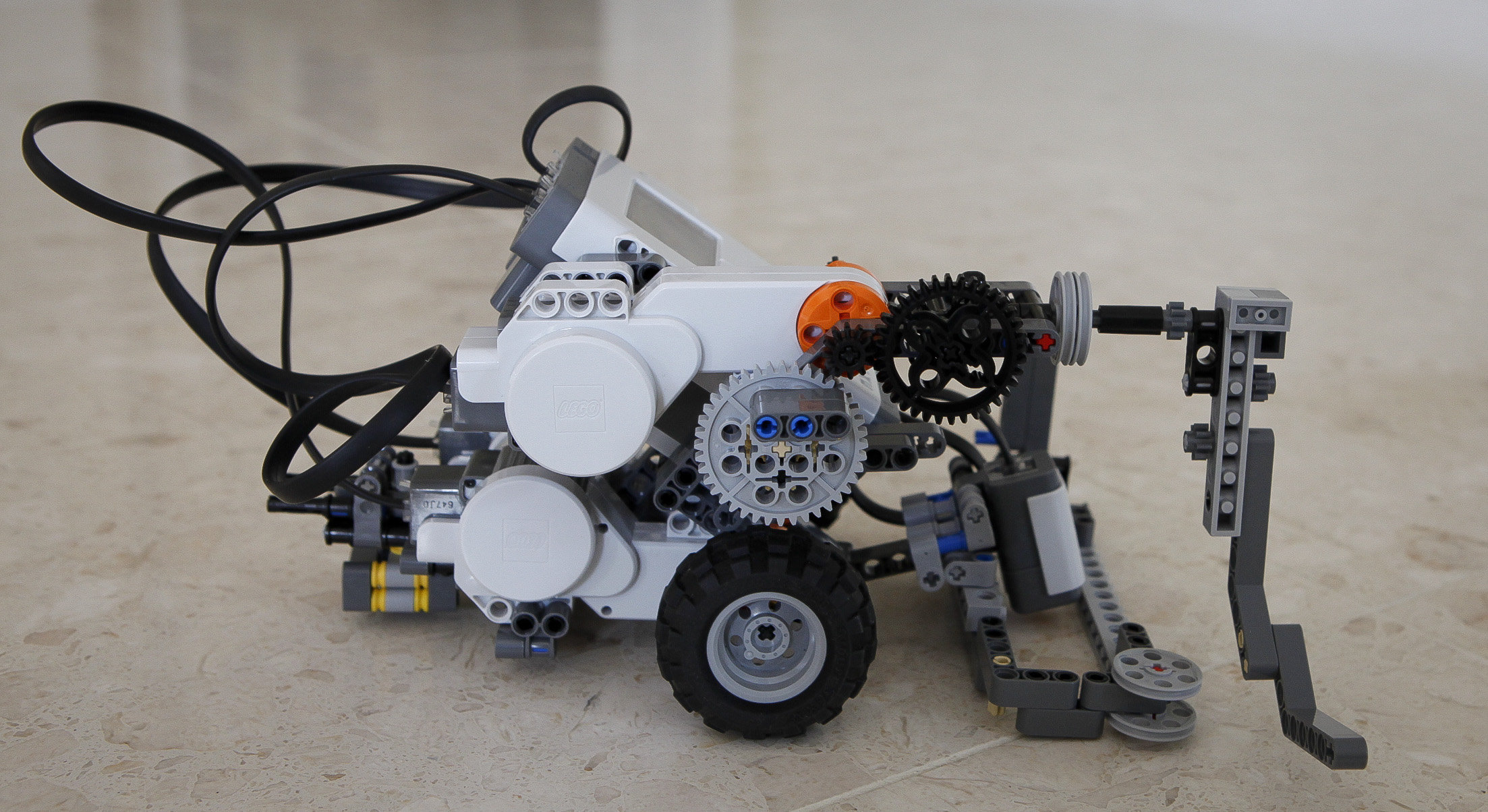
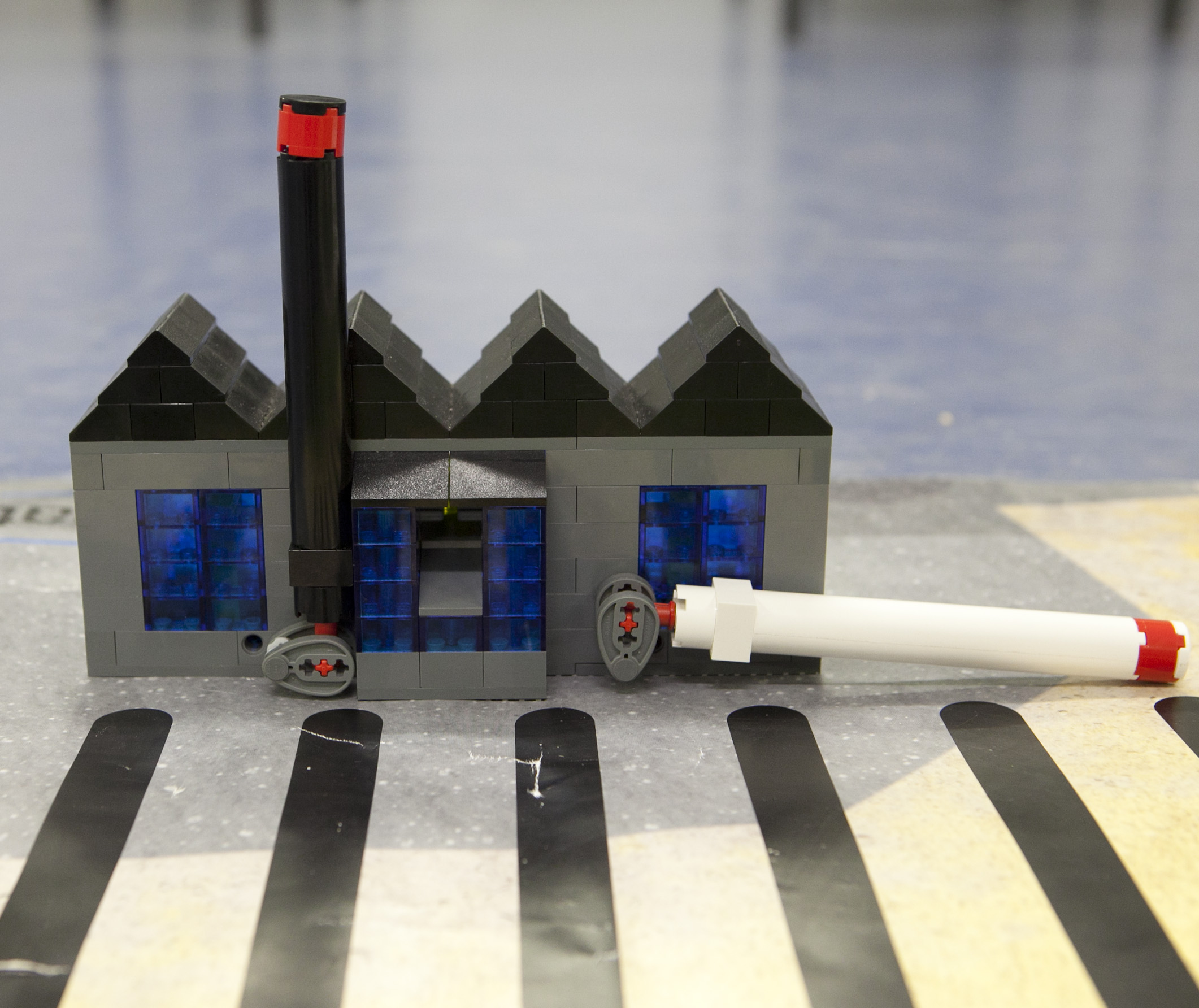
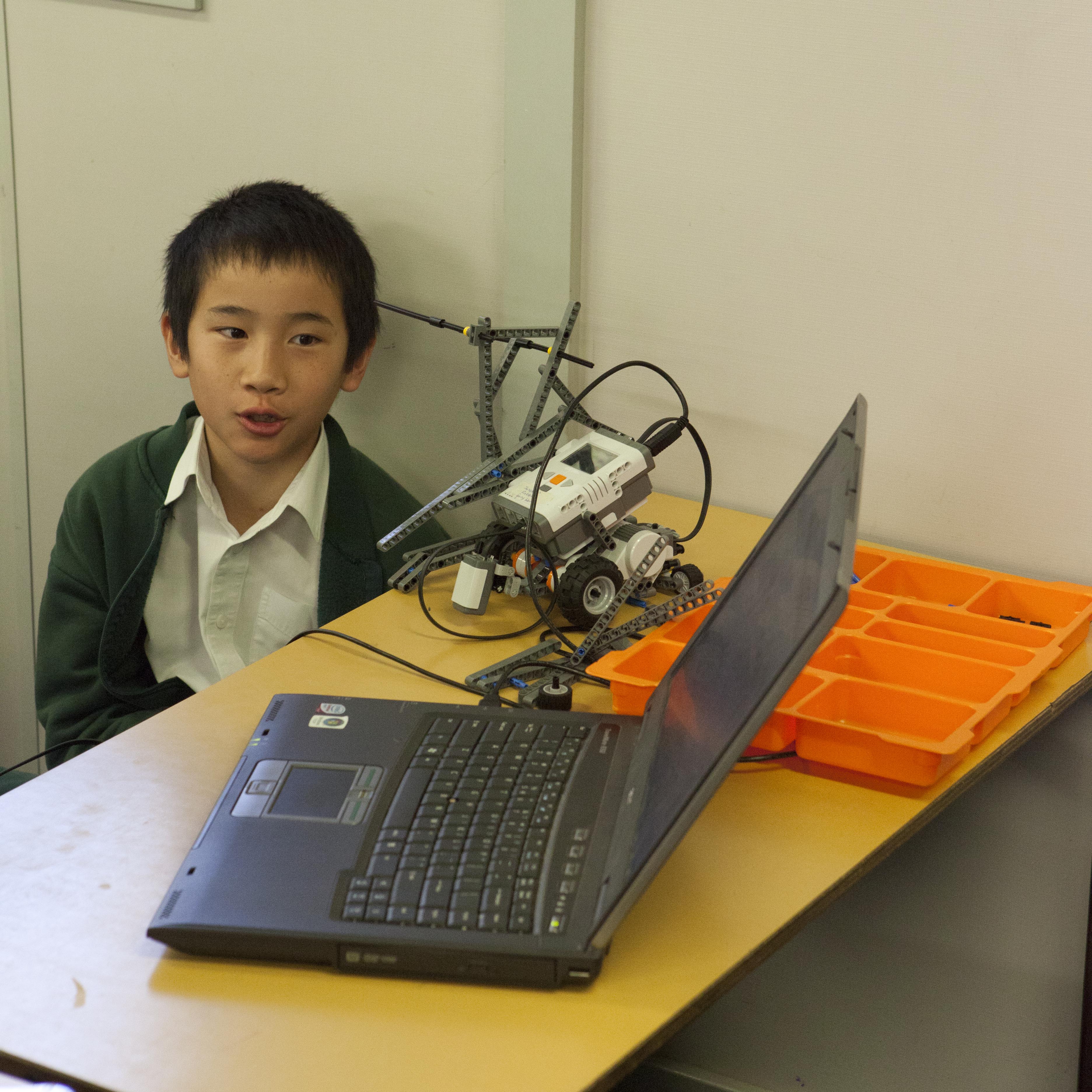
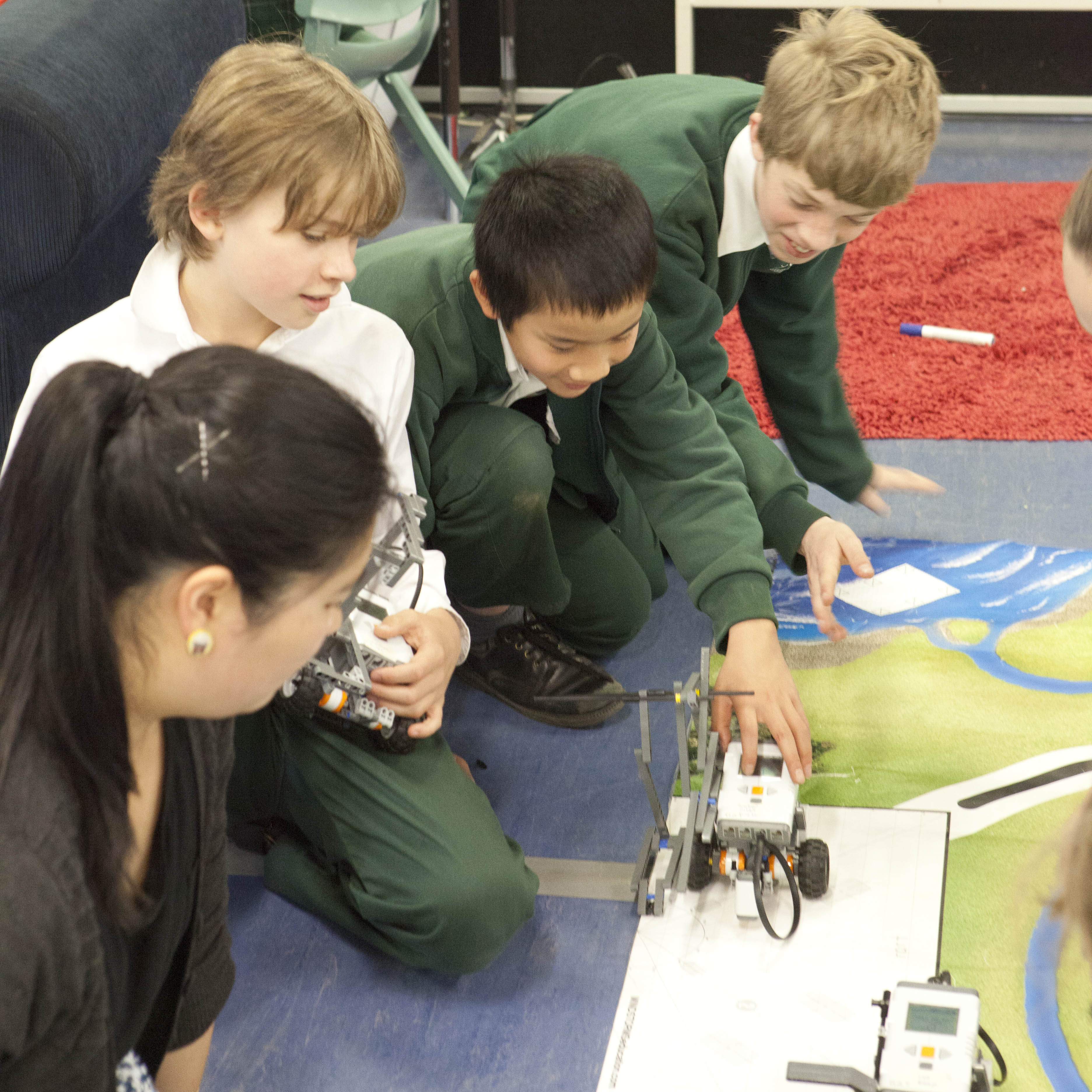
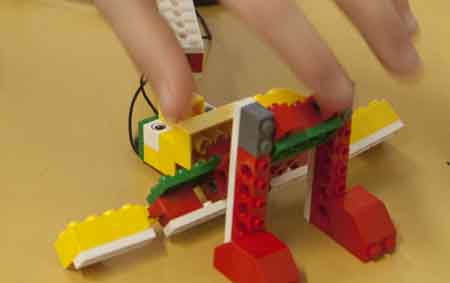
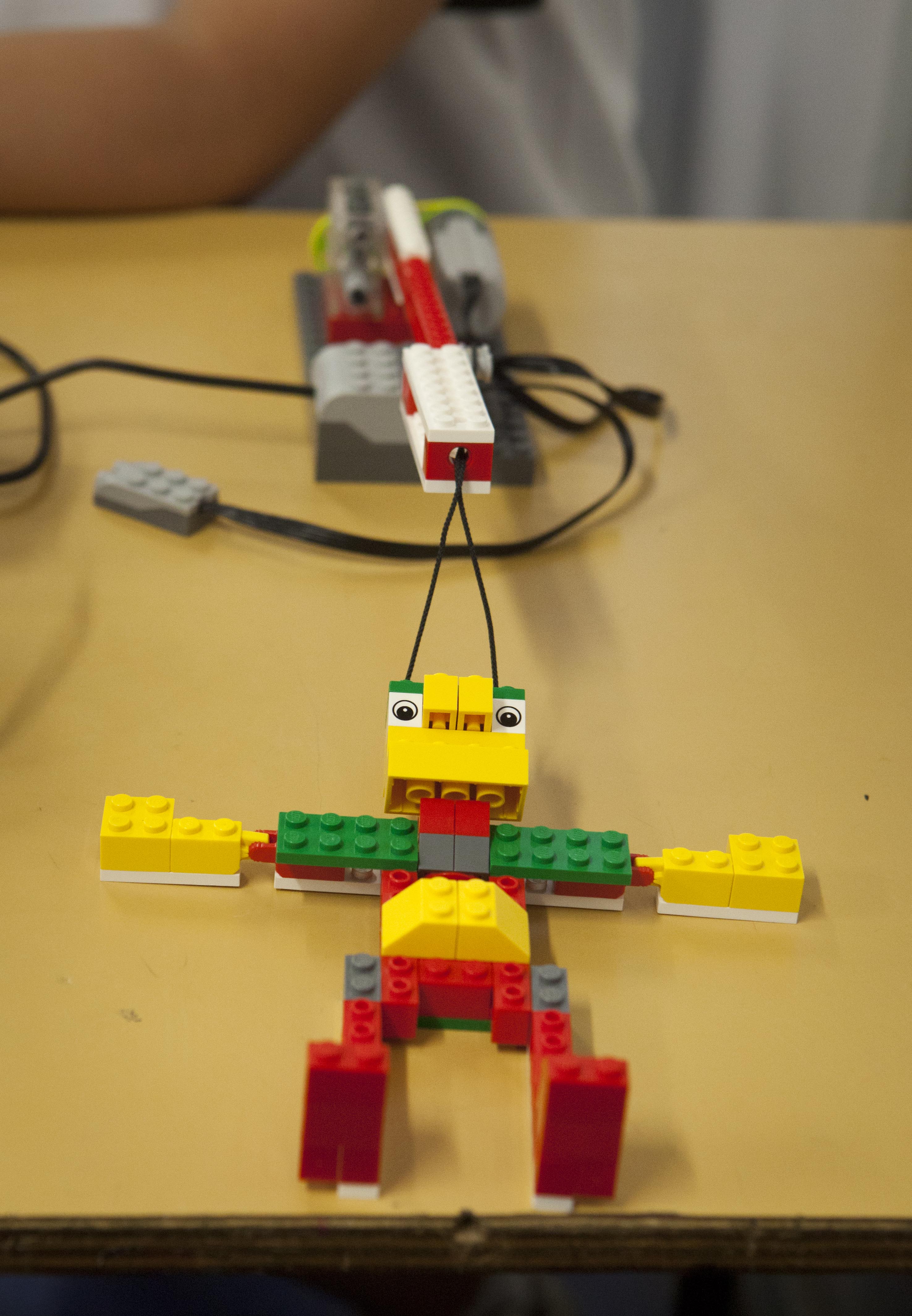
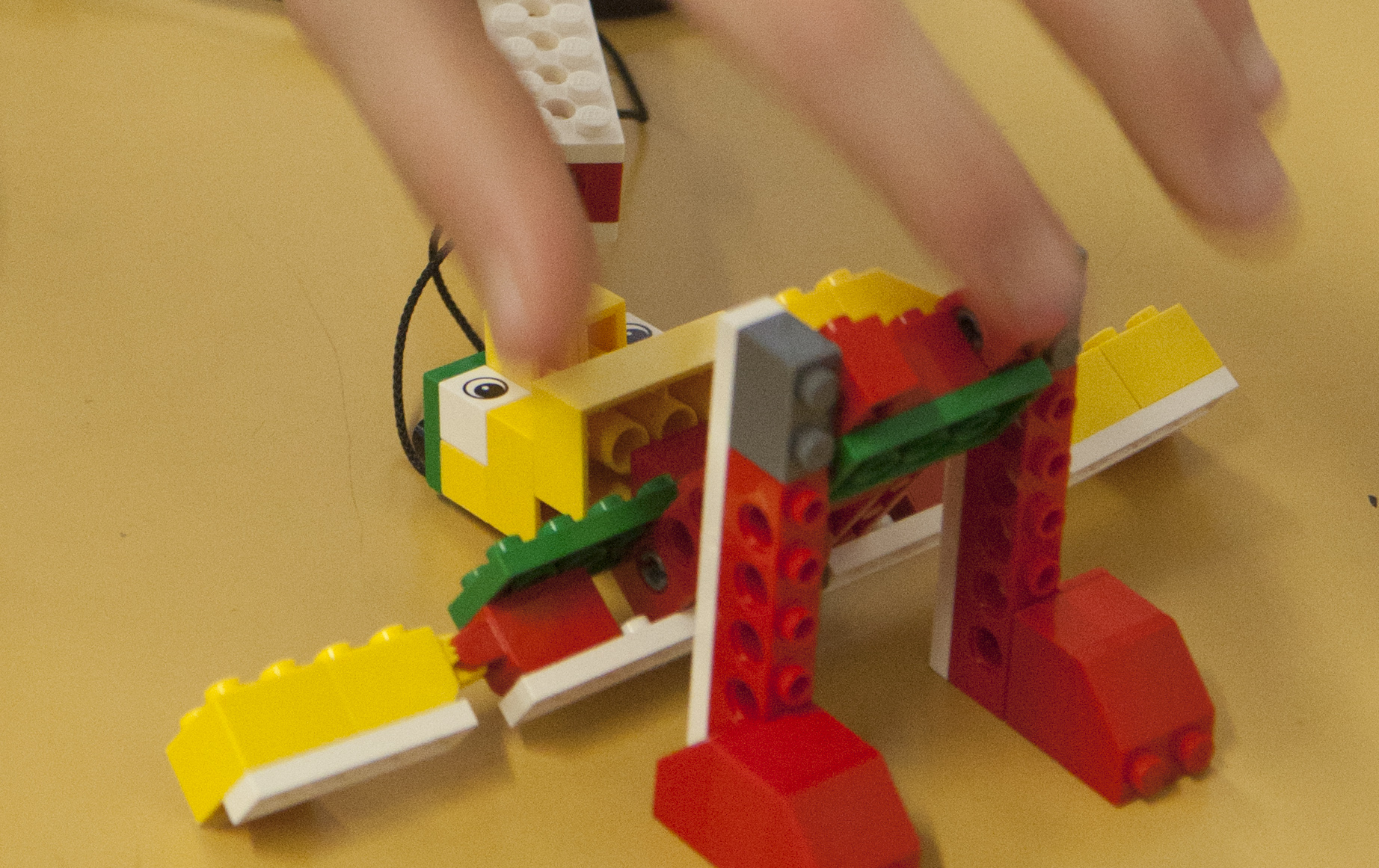
The giant is sleeping on the ground

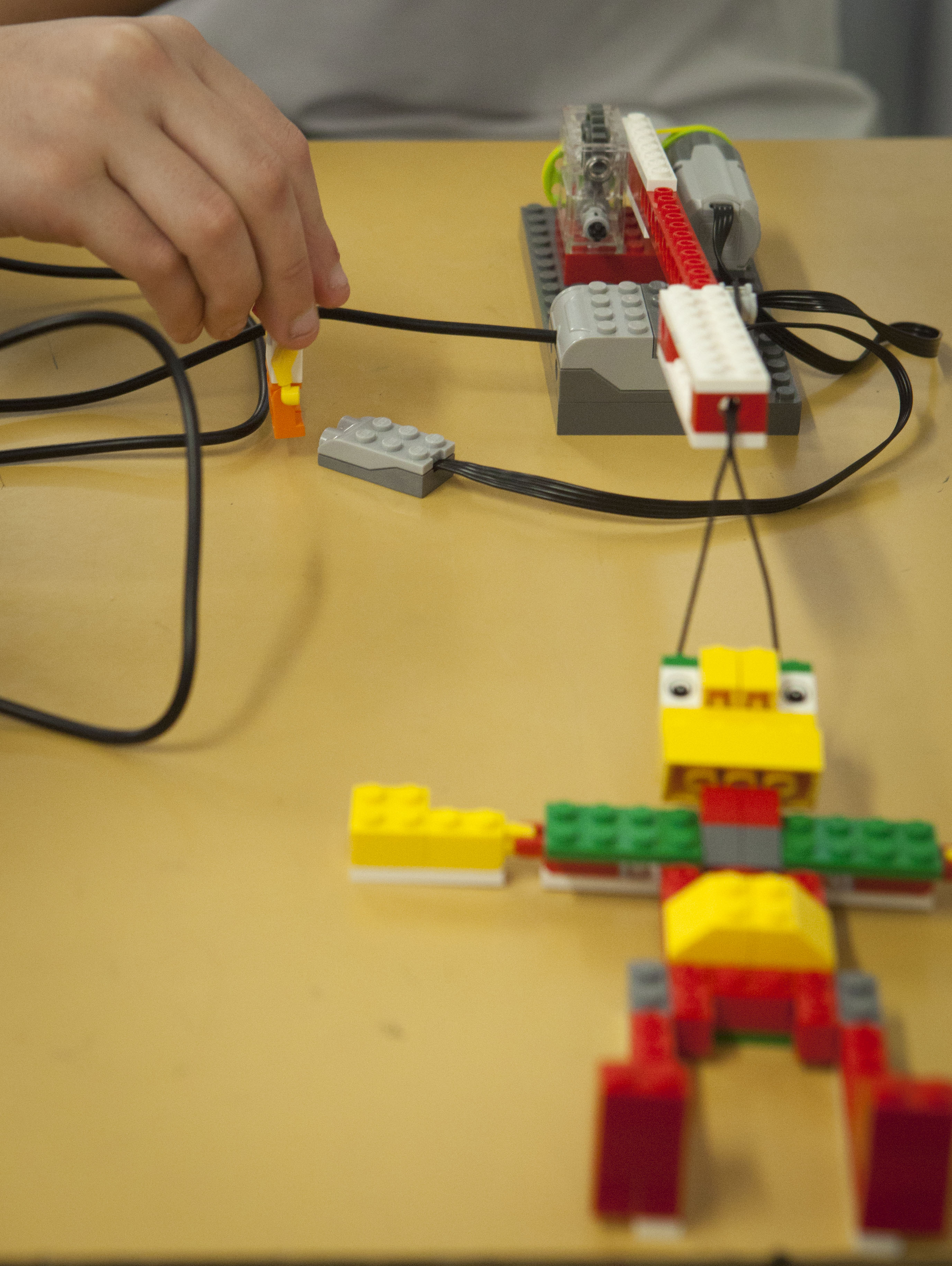
Person walks by the motion sensor and wakes up the robot
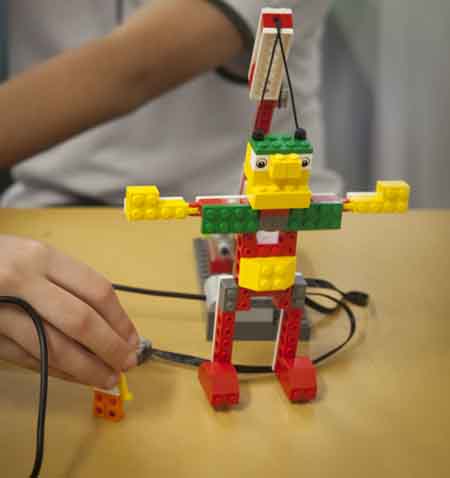
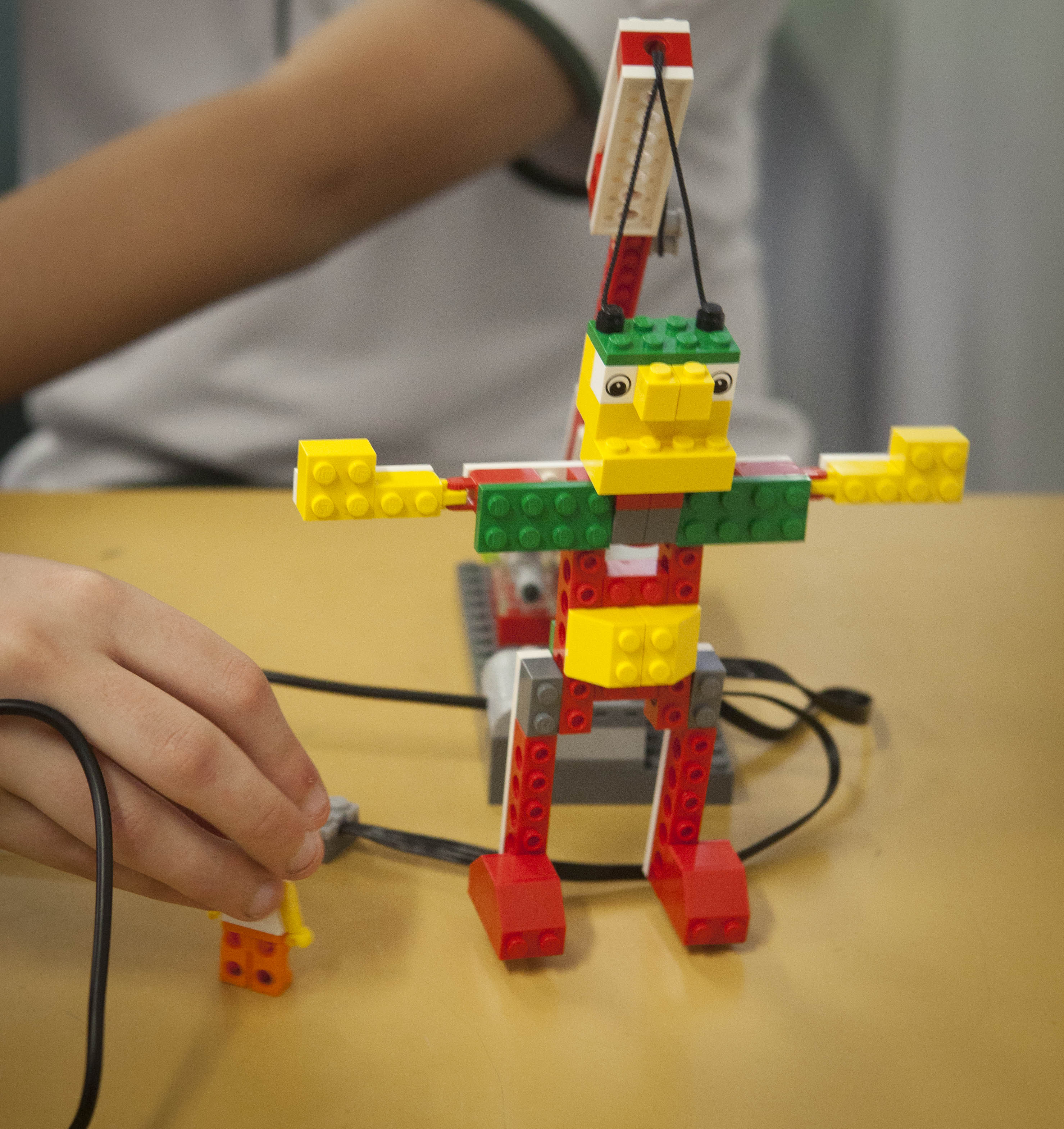
The giant who was snoring and sleeping – now rises up and roars. He is pulled up by a crane and operates like a puppet.
Students program the robot to go back to sleep.
When years 3 and 4 carried out a more simplified version of this activity they wrote a script for the giant and the offending Lego person. This script included the way they escaped from the giant. Some very innovative and fun scripts were created!!!!!
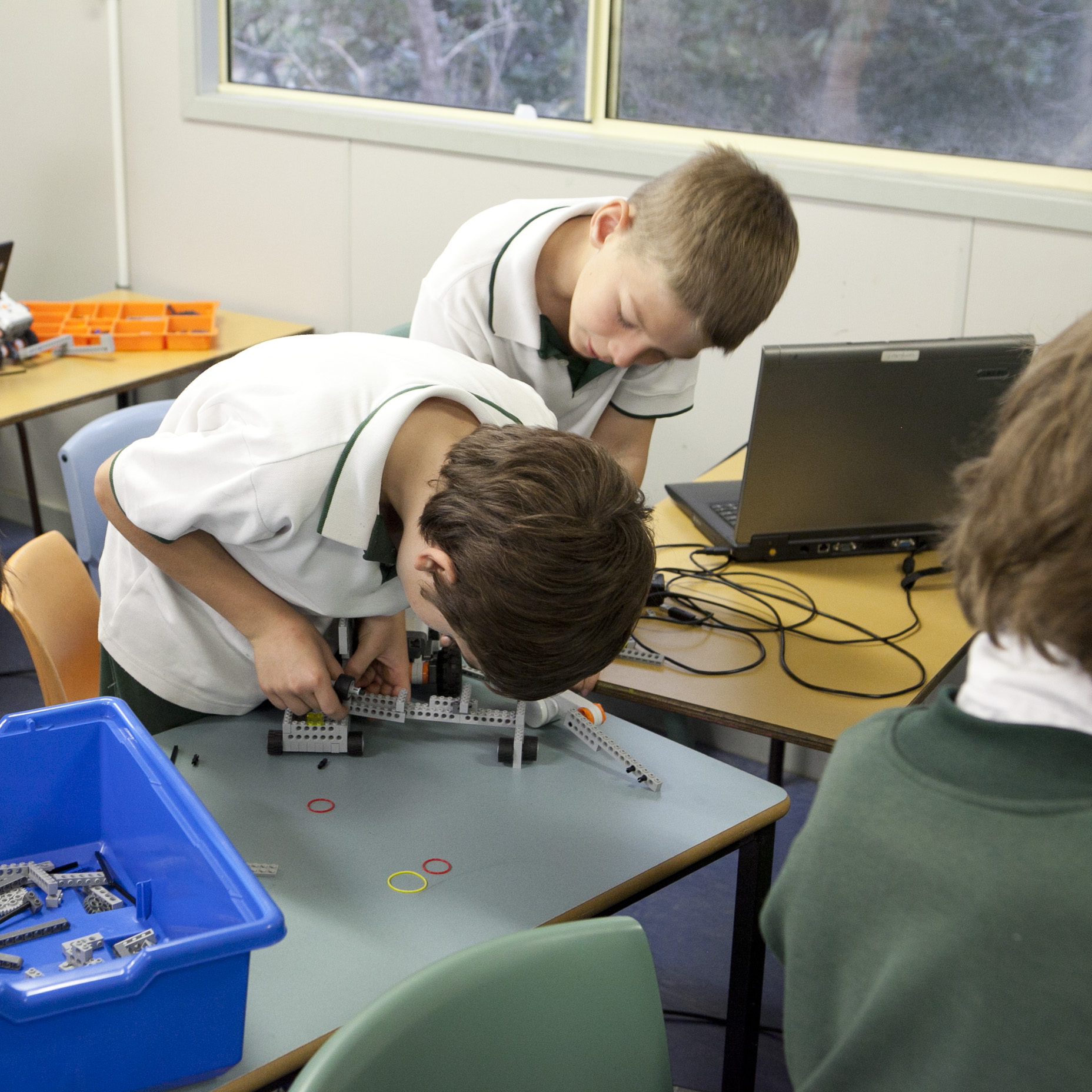
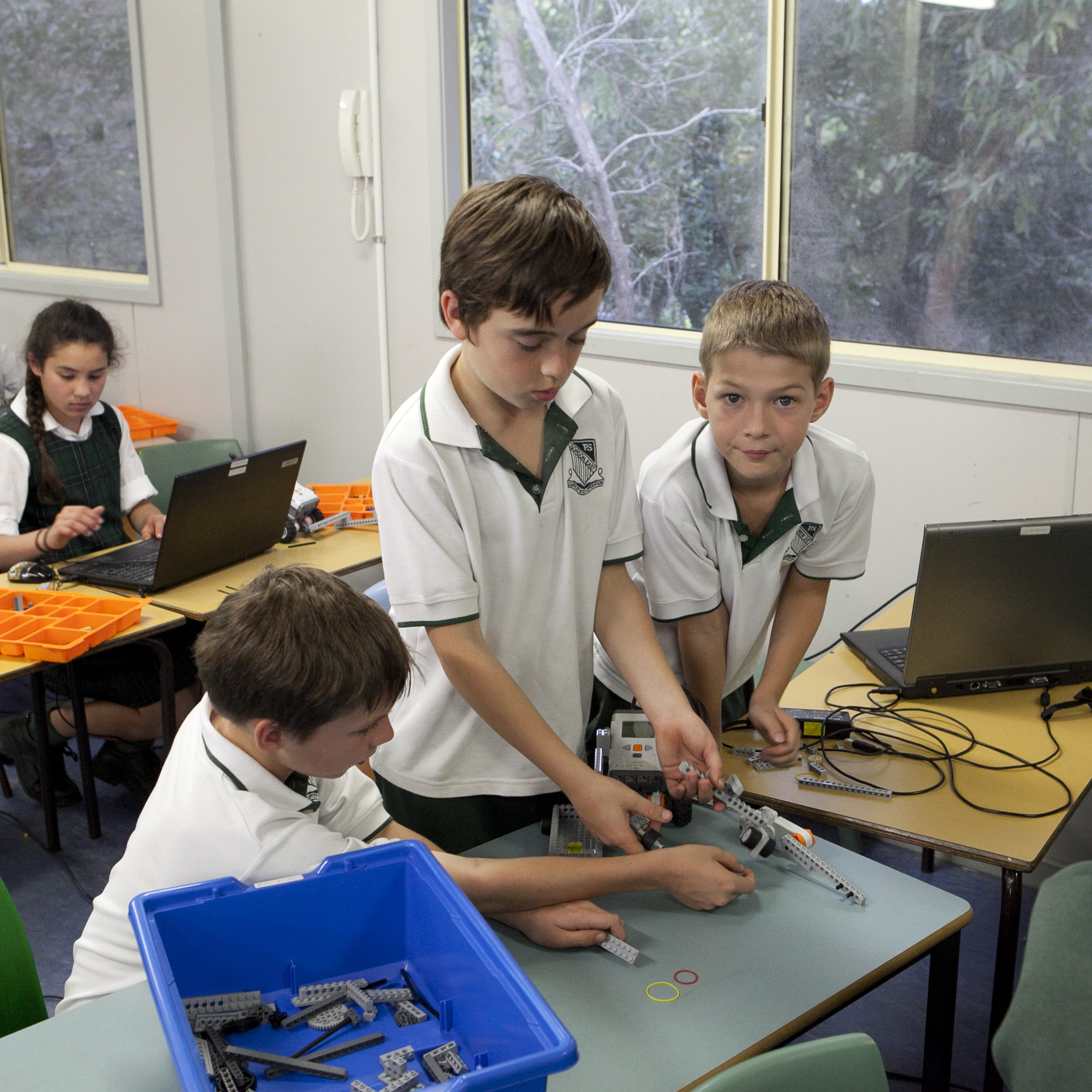
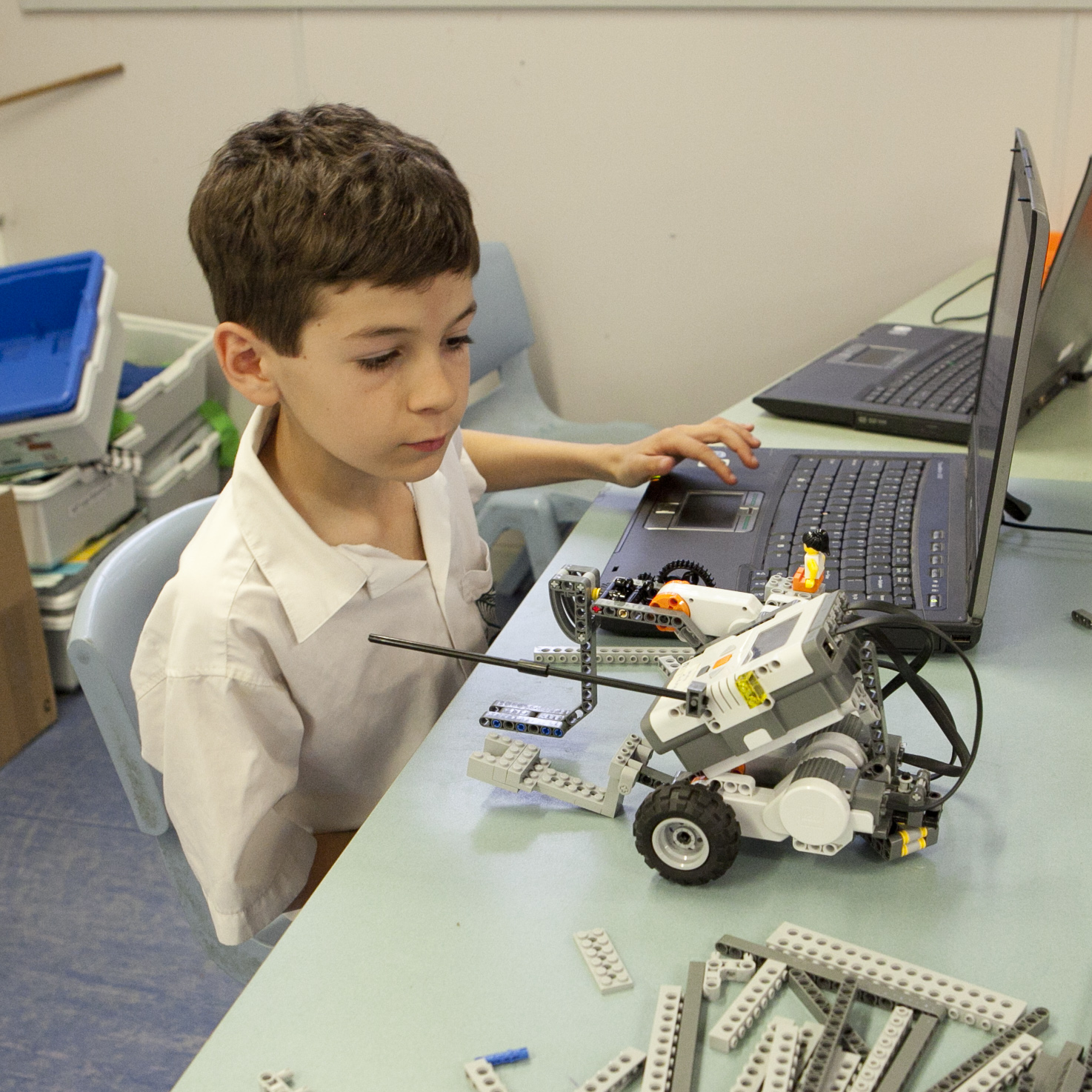
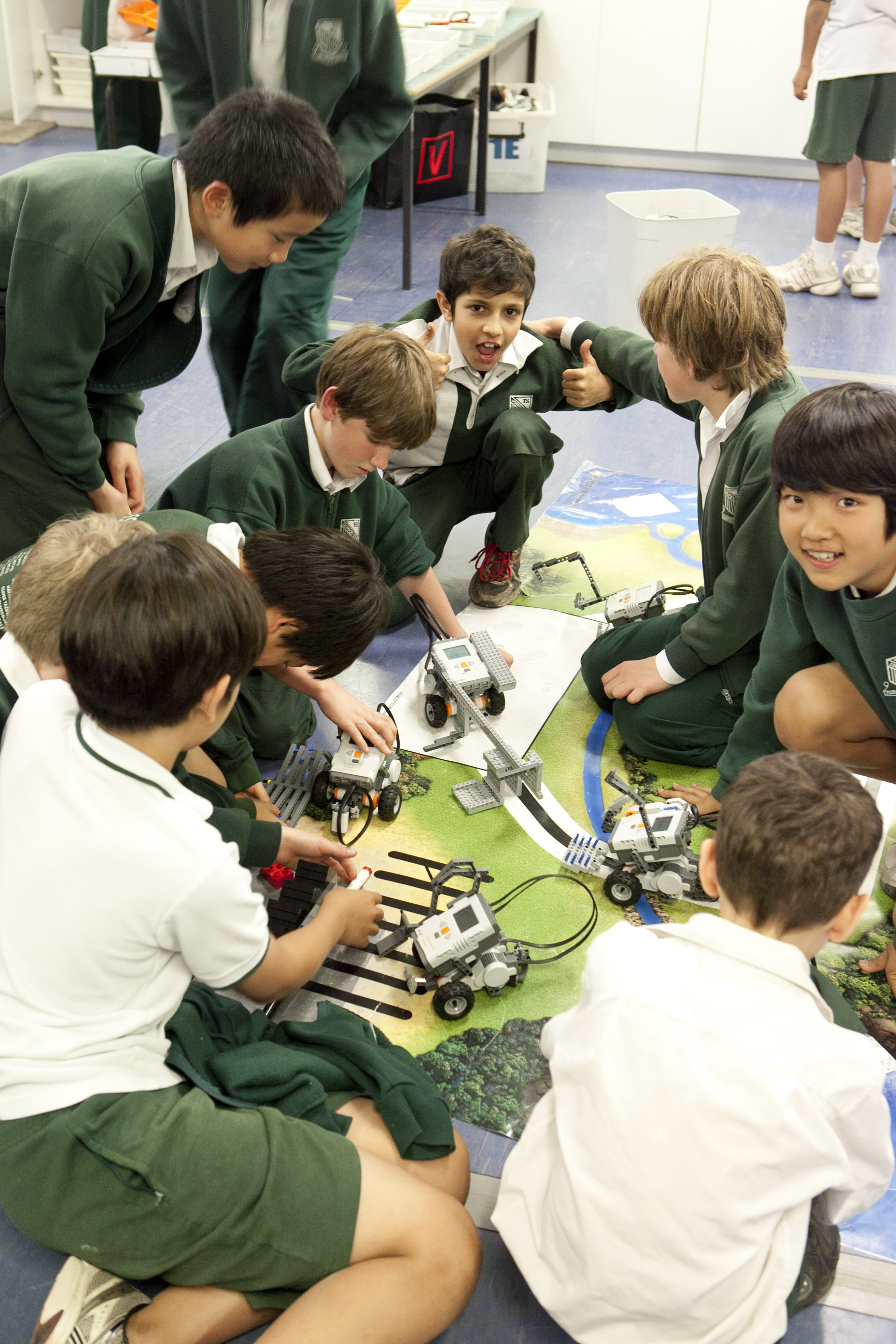
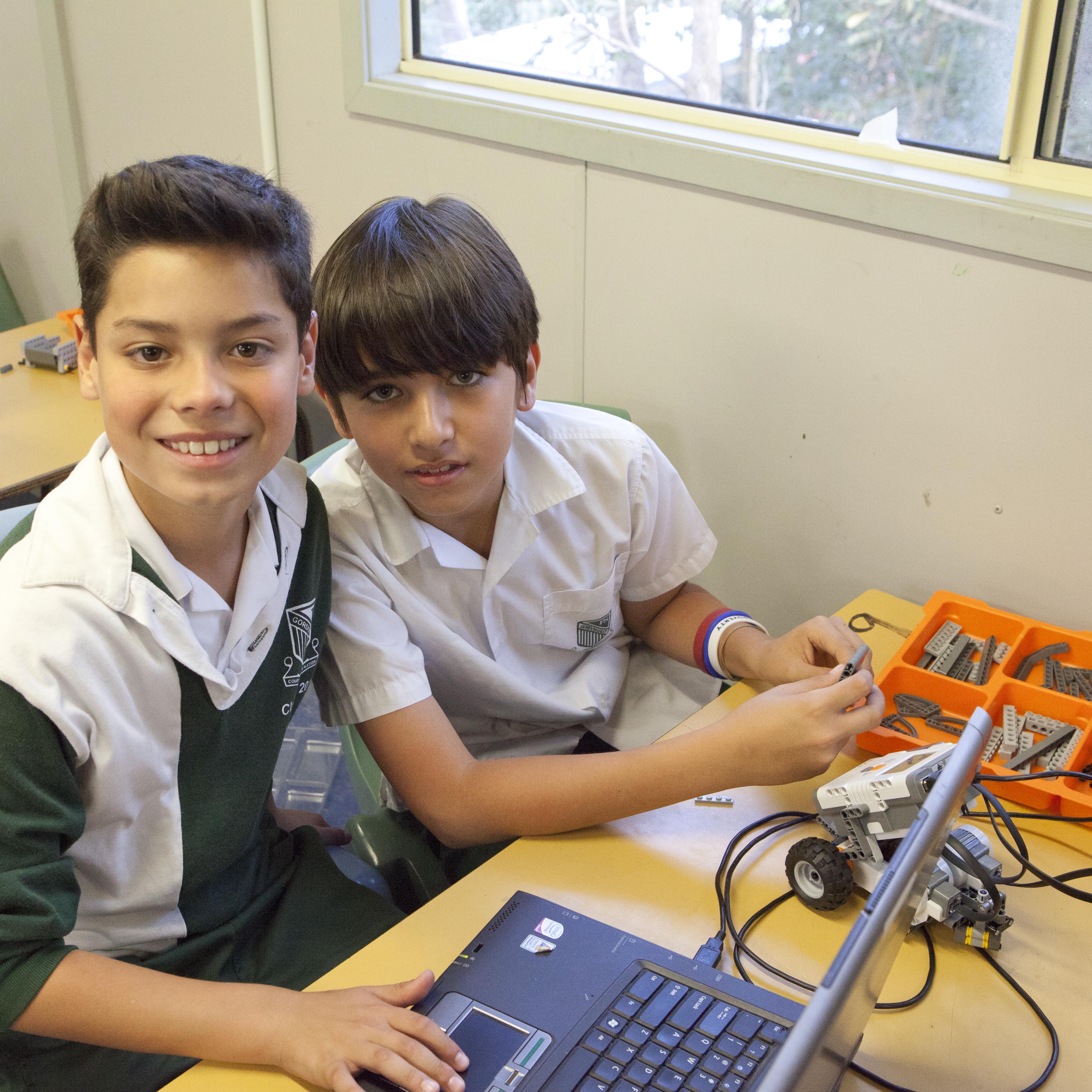
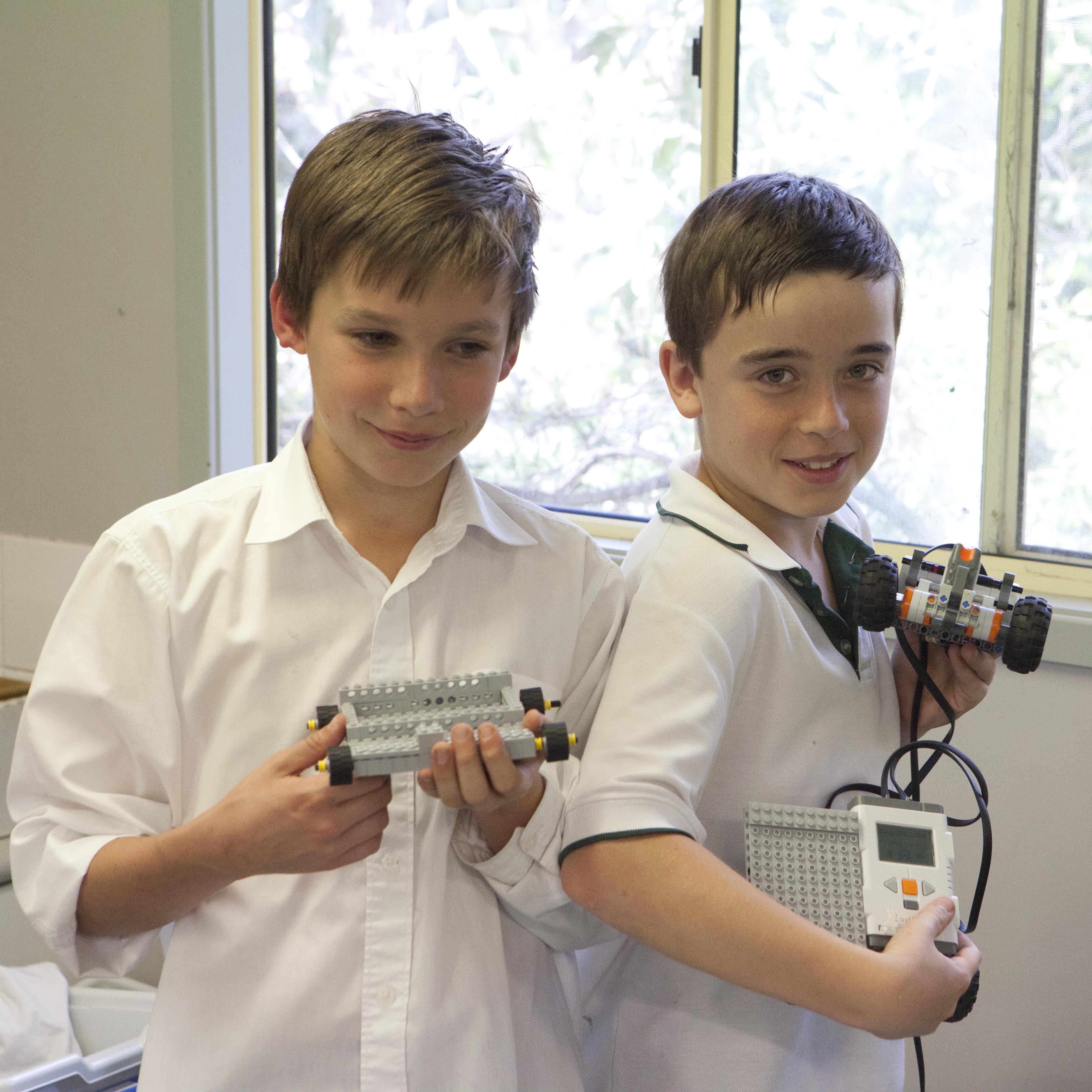
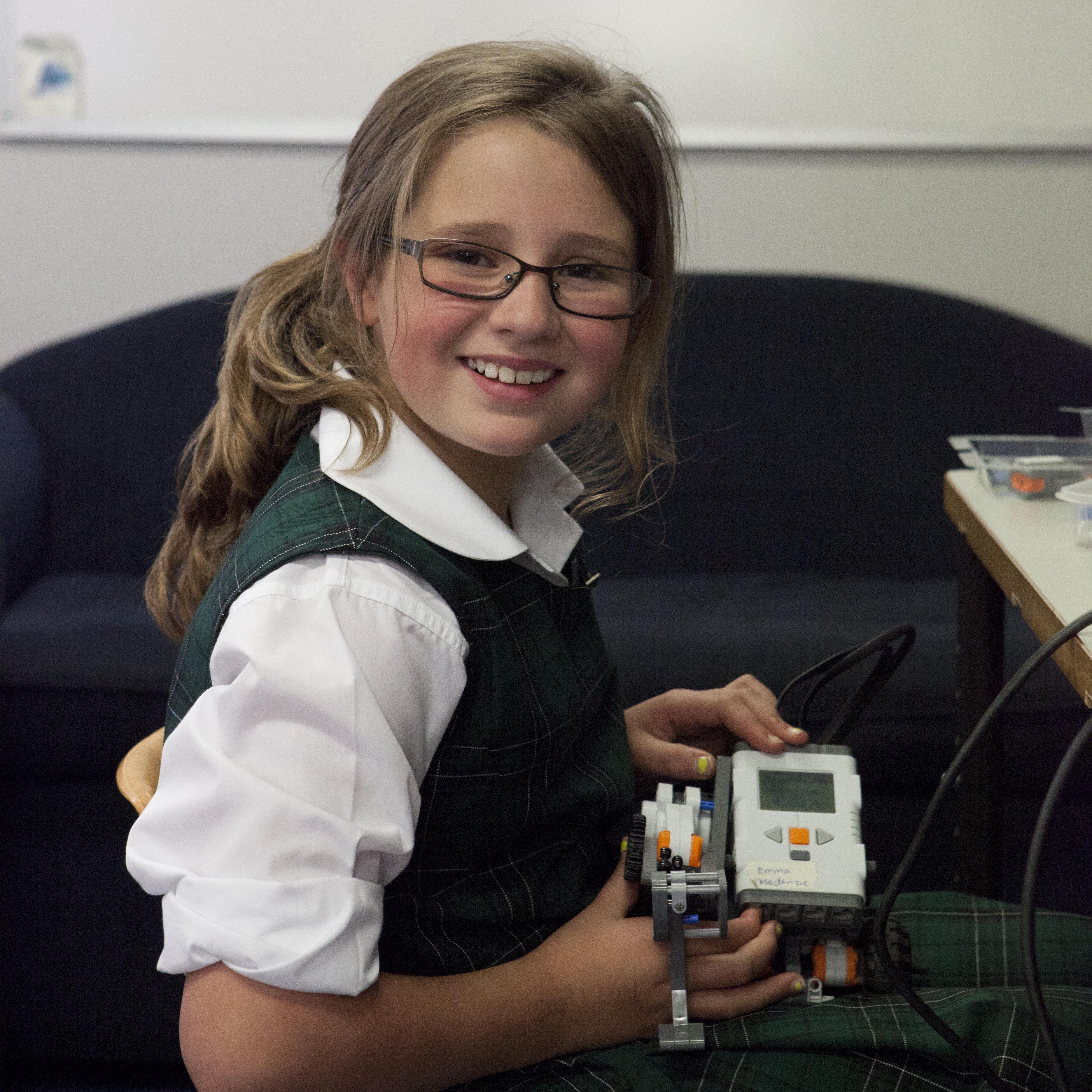
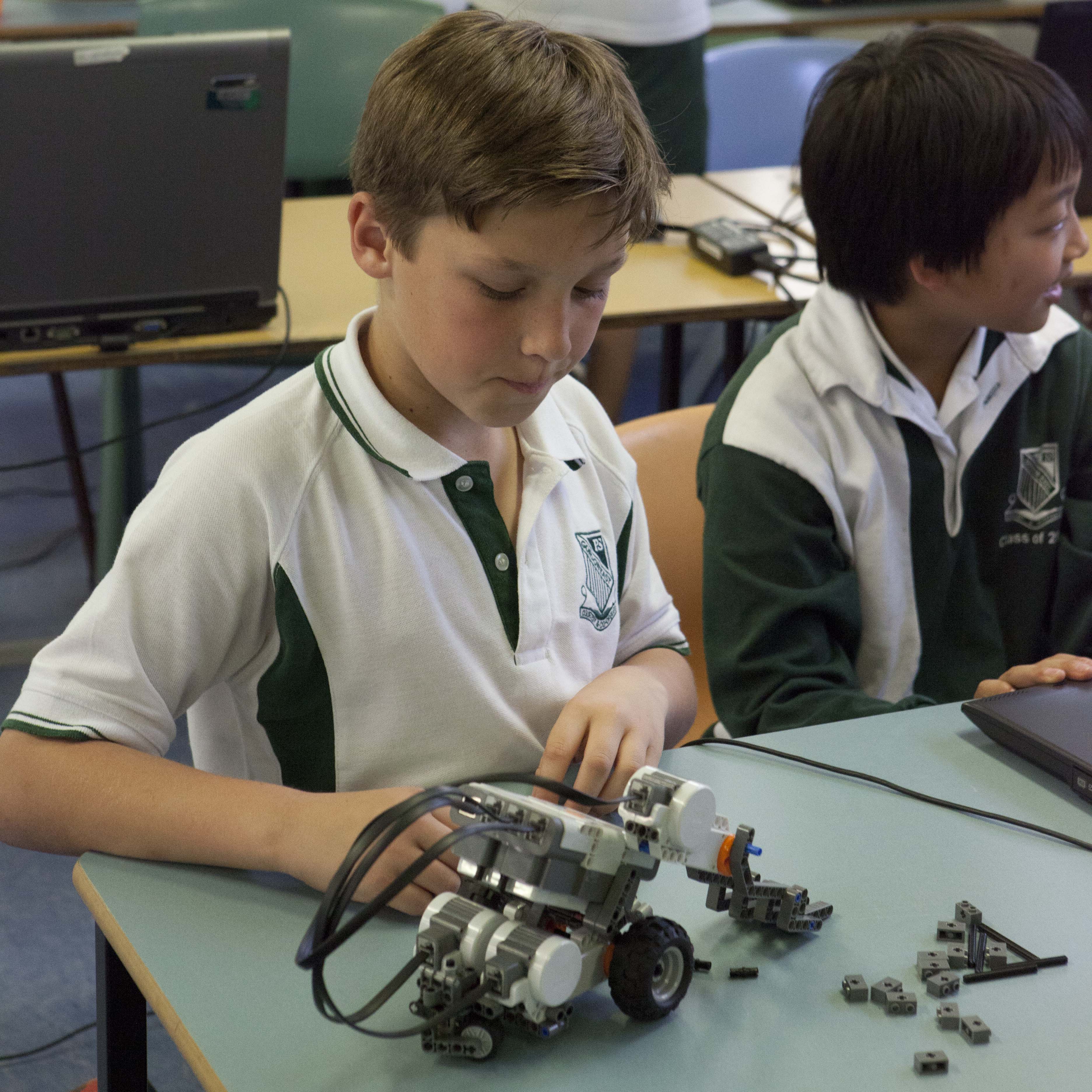
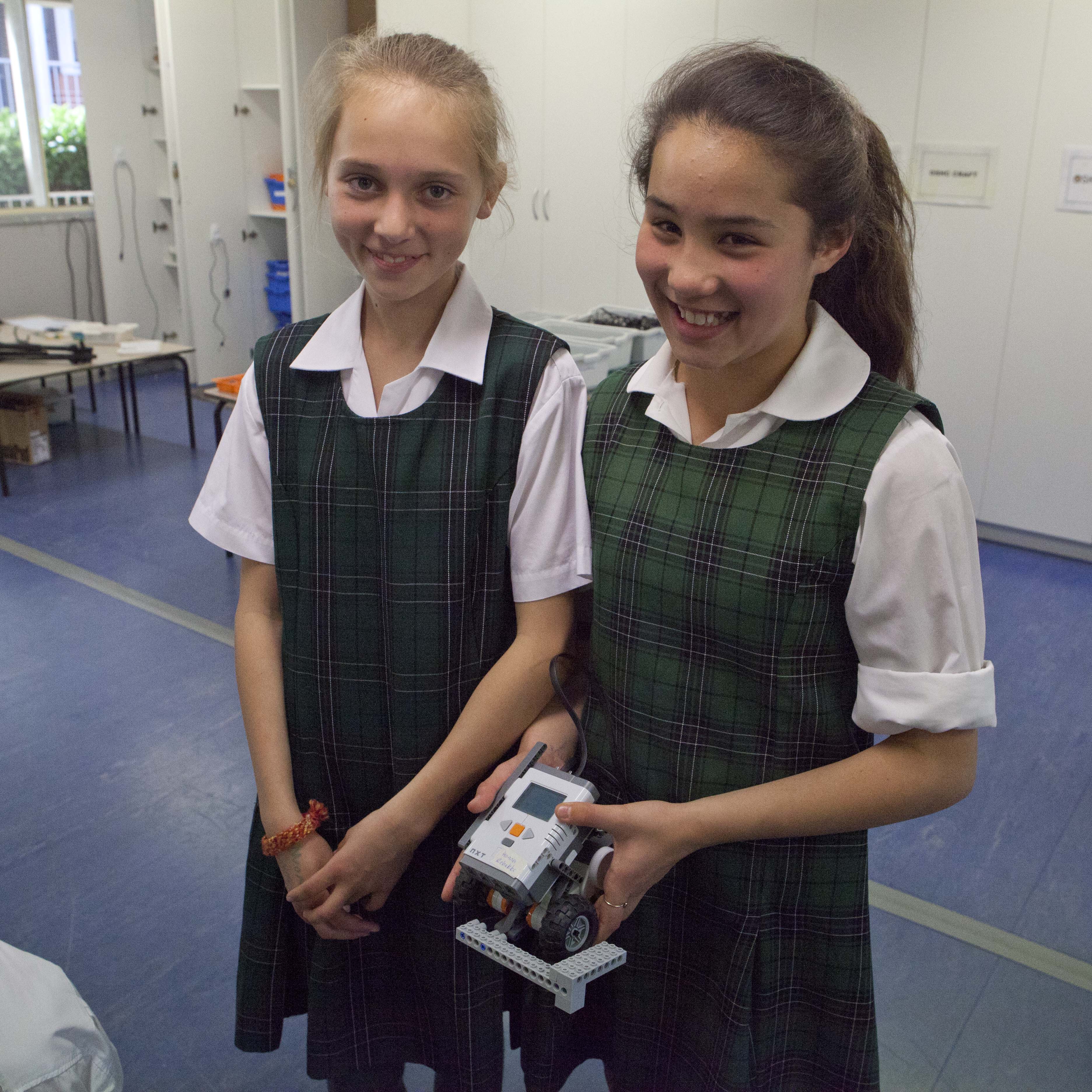
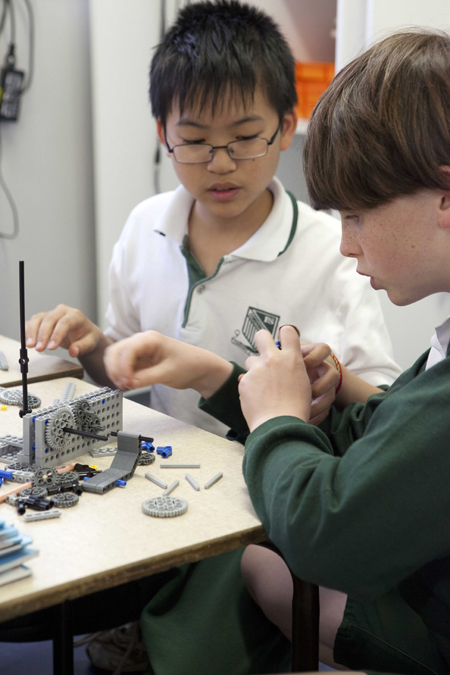
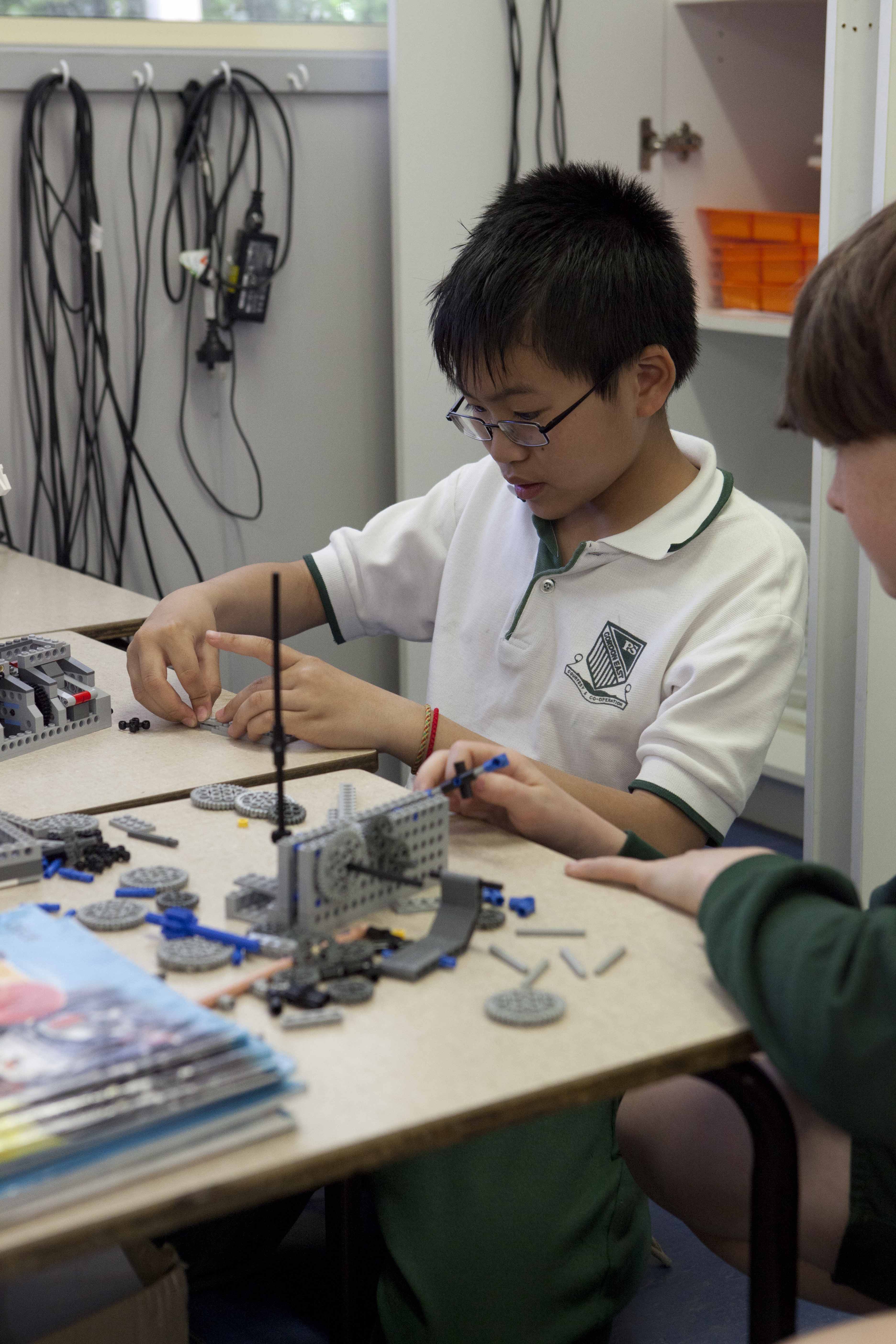
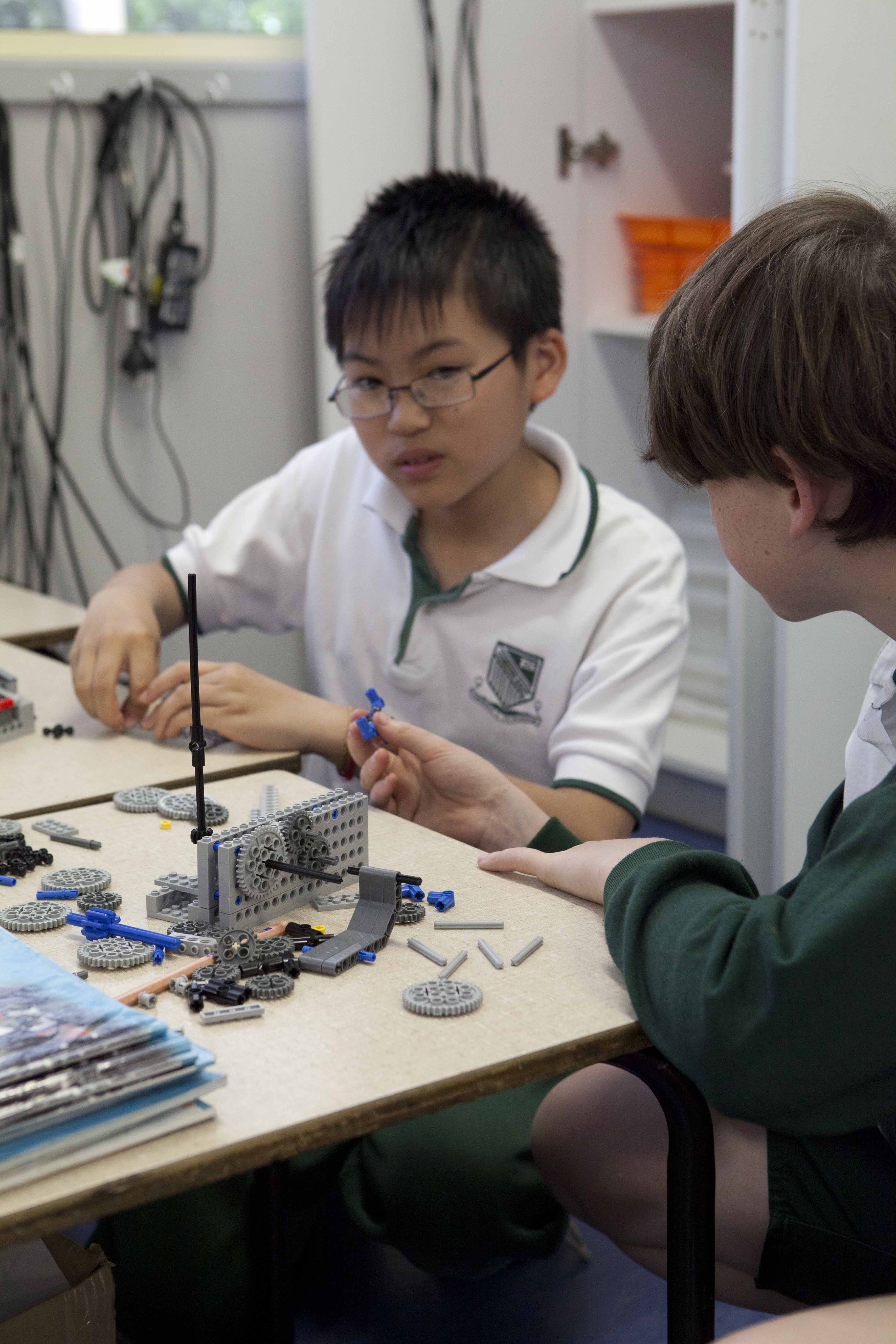
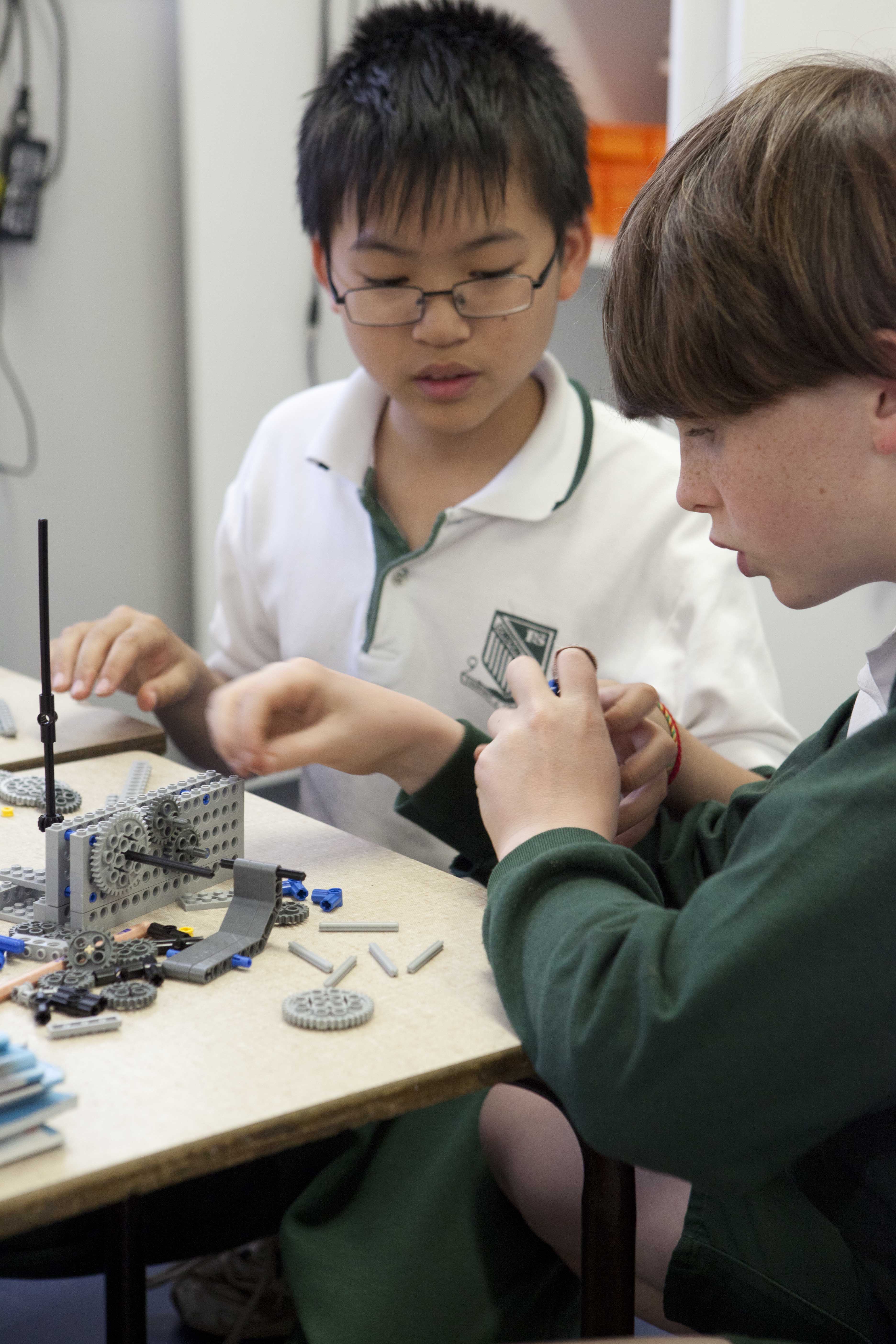
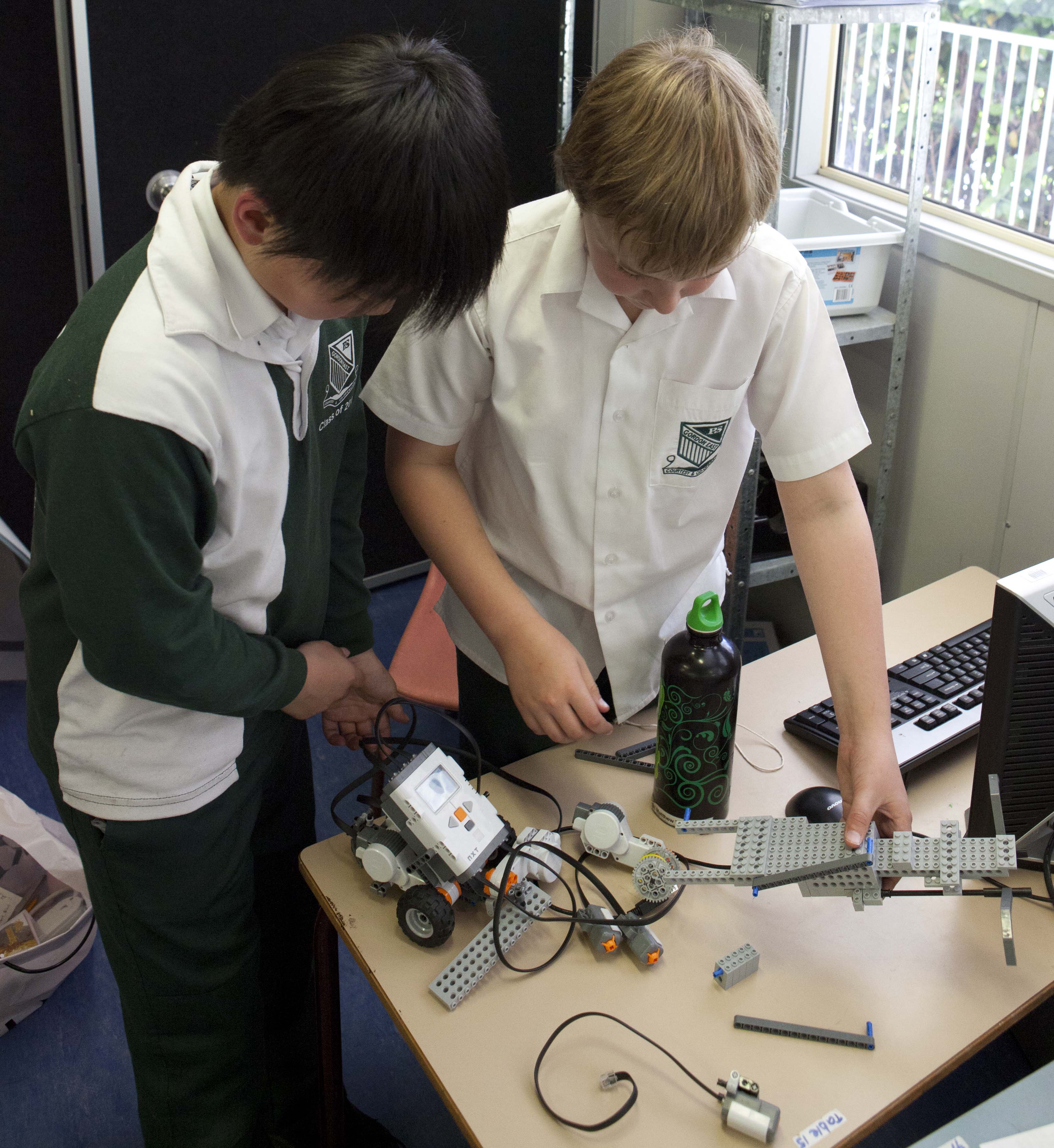
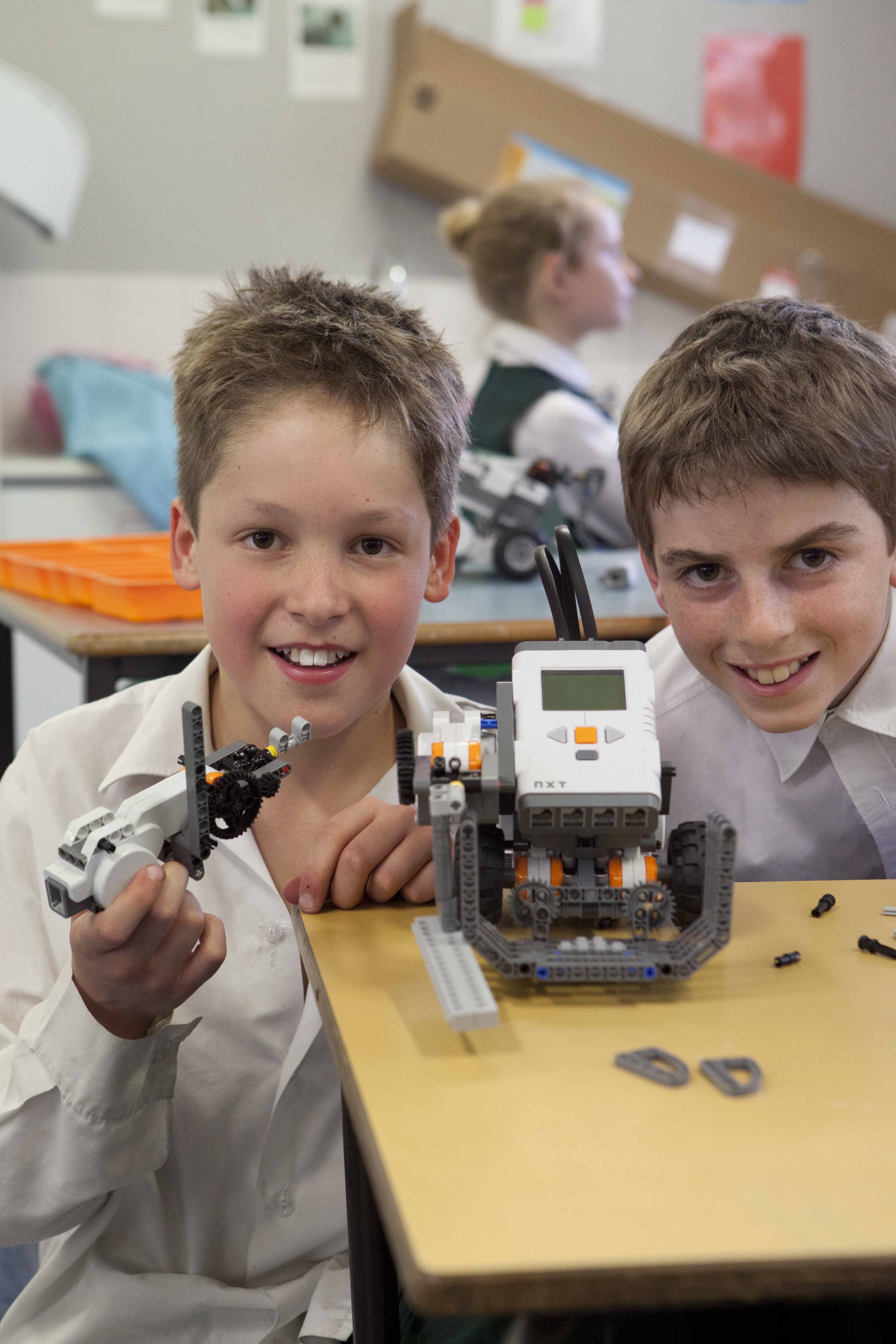
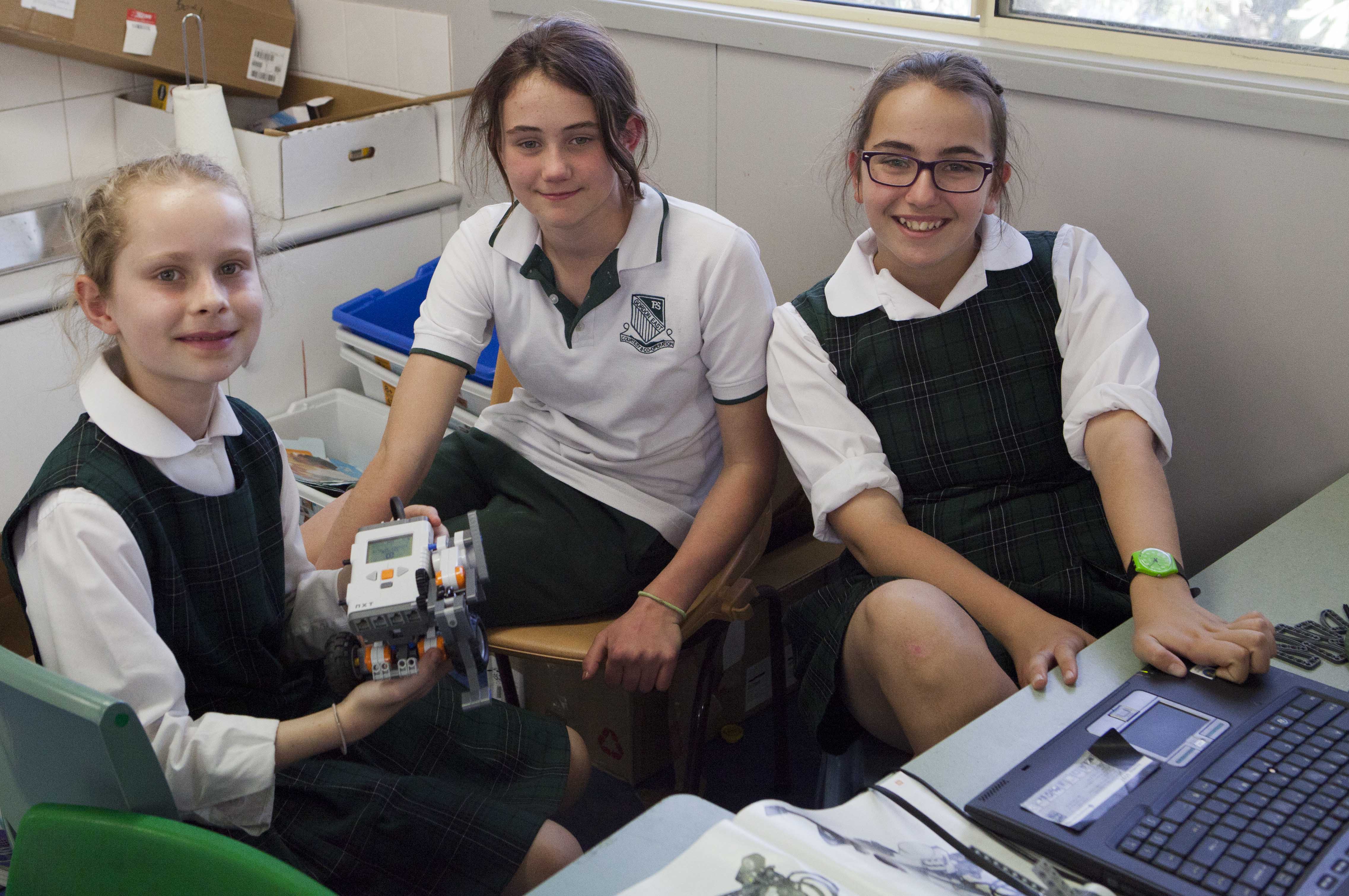
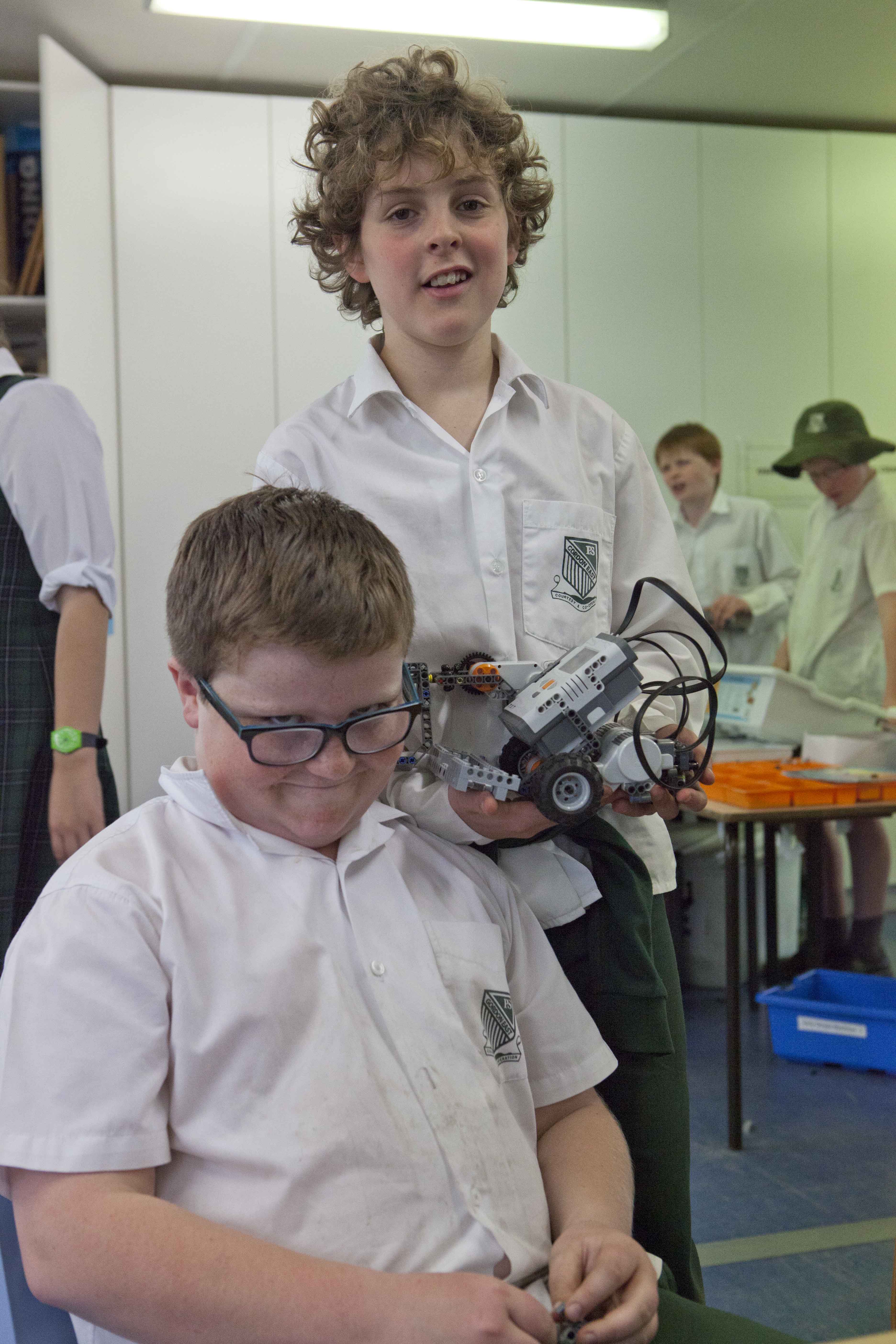
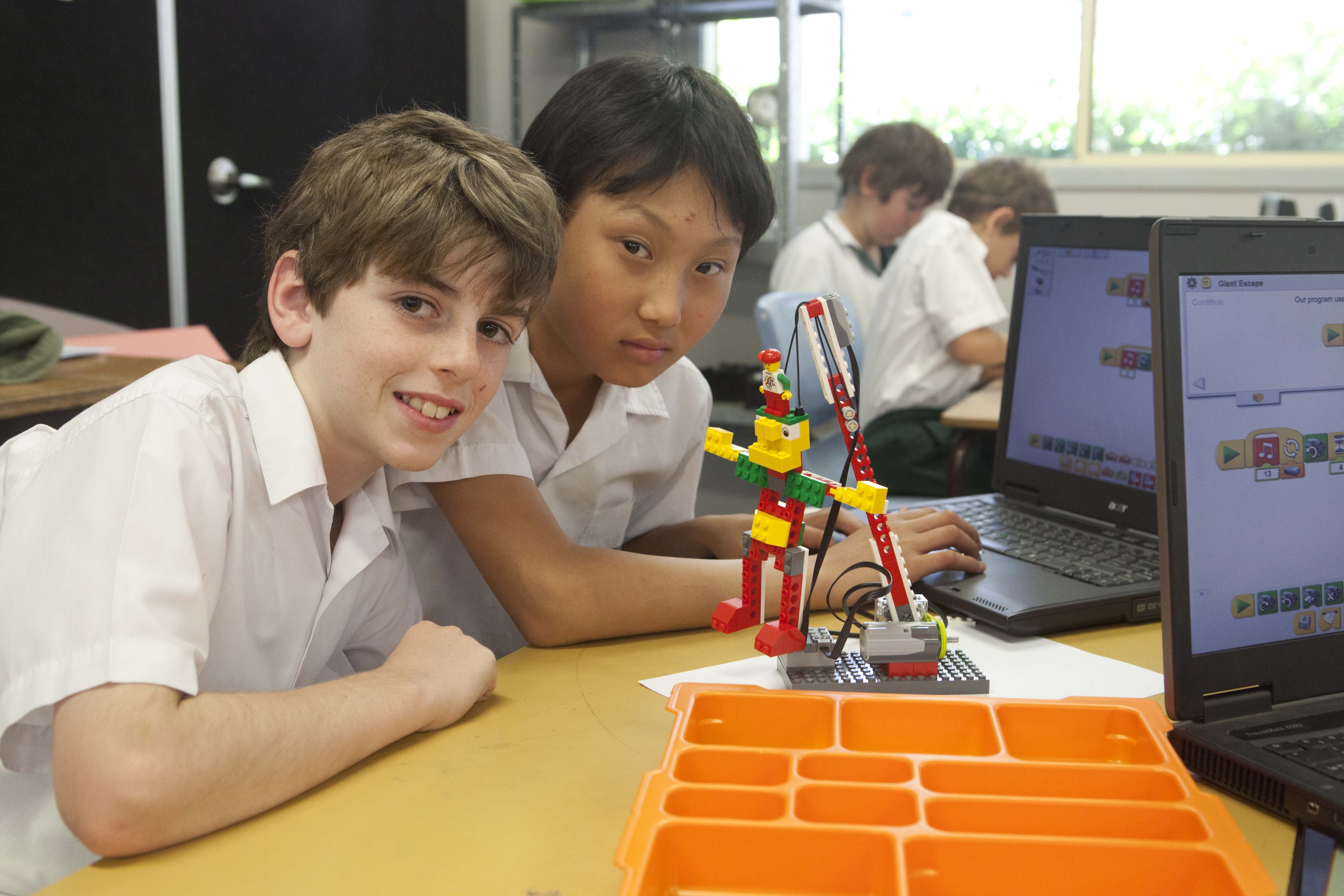
Here are some more pictures for you of our older children in action.



Thanks for calling by
Mrs Garlick