Dear Bloggers,
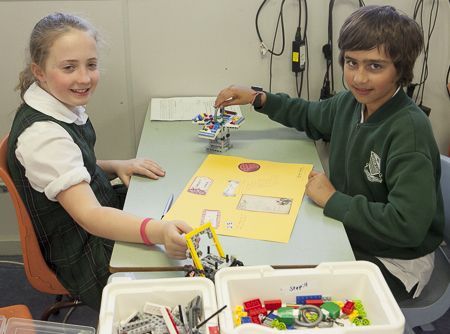
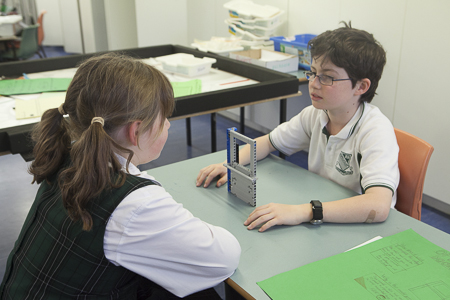
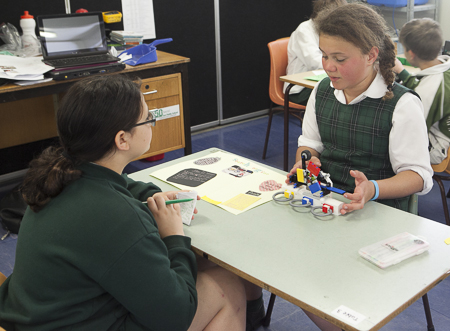
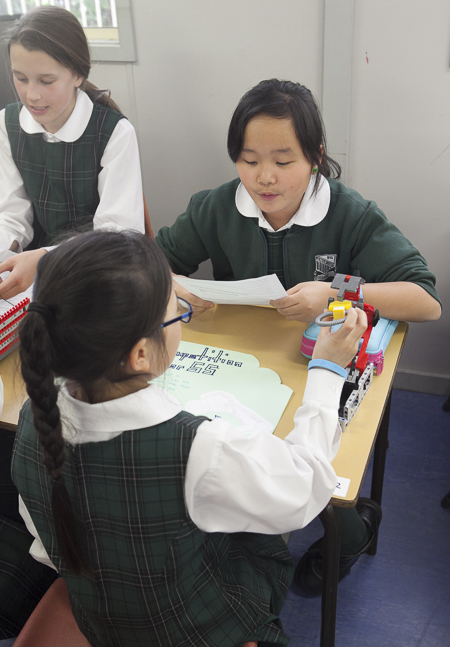
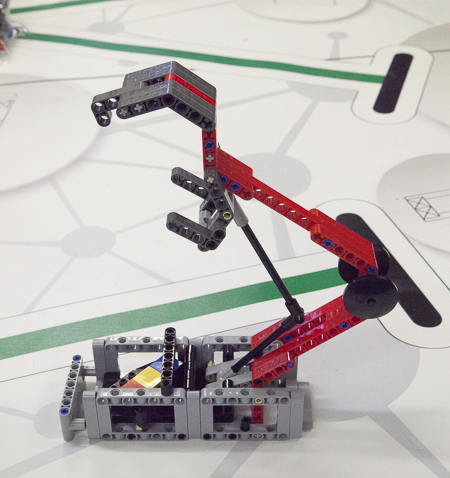
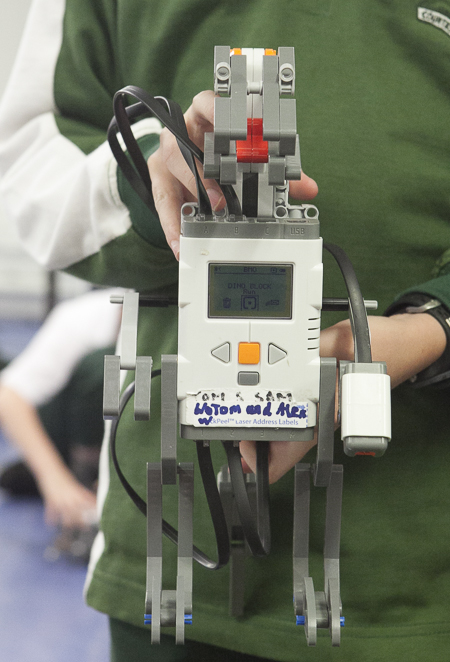
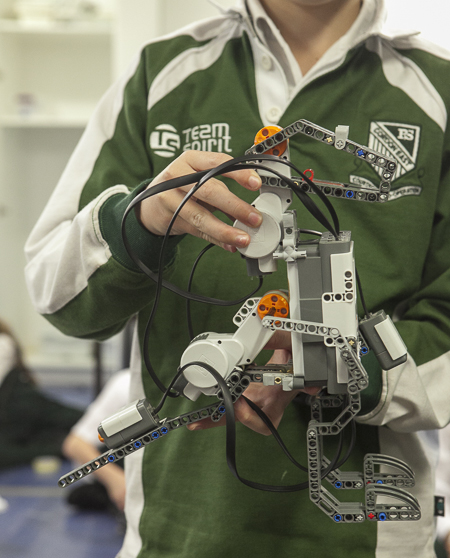
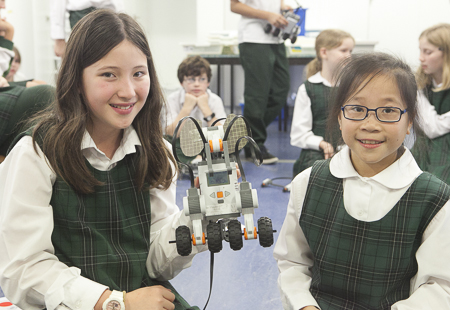
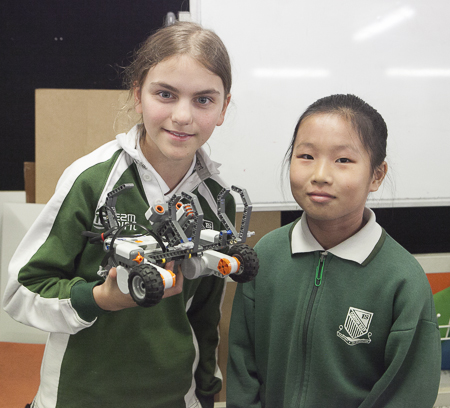
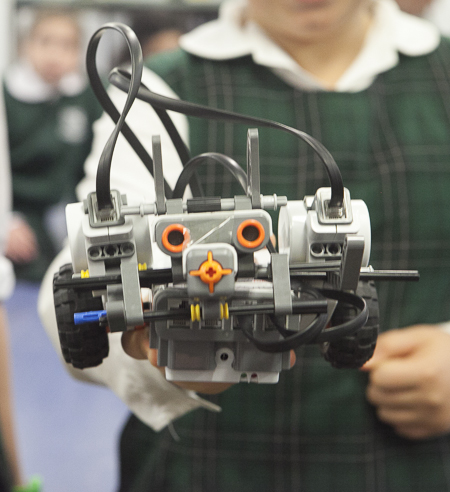
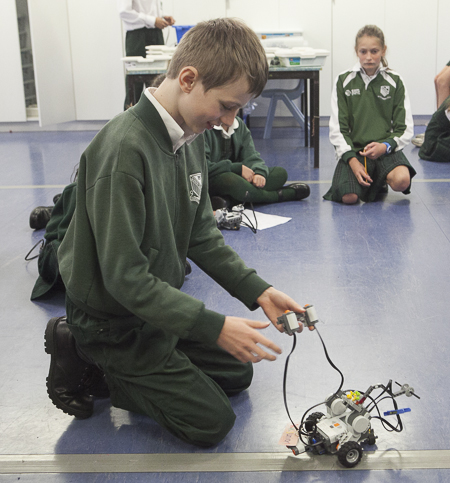
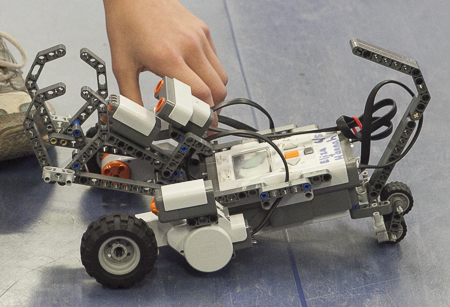
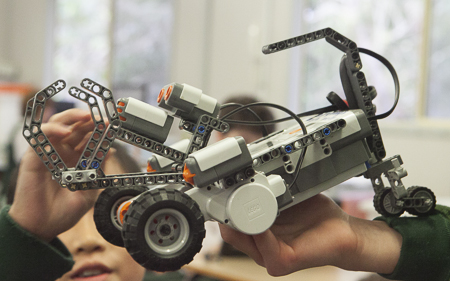
Years 5 and 6 have been working industriously on their robotic pet show.












Here is what they were asked to do:
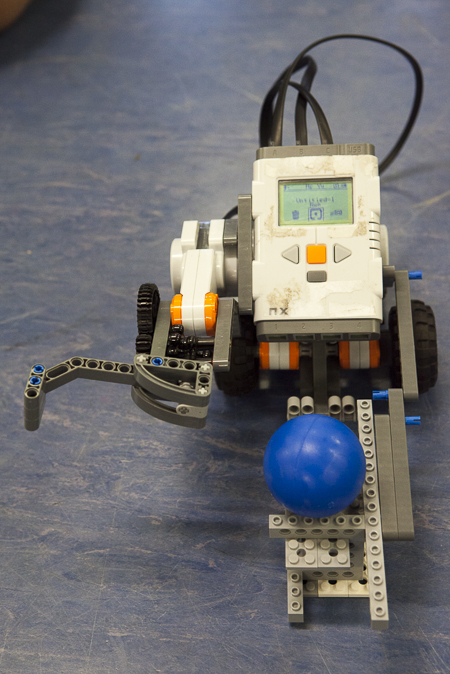
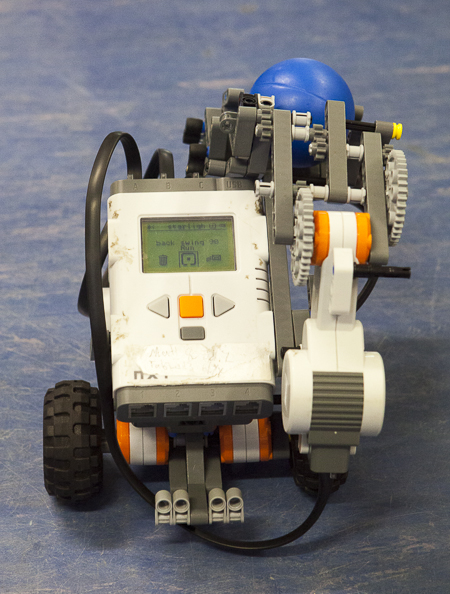
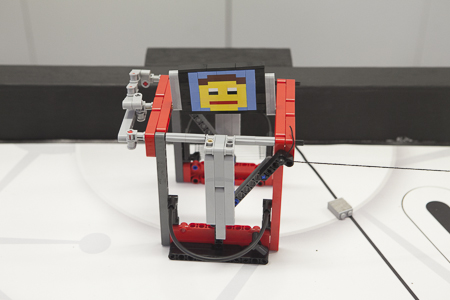
Design and make a pet and program it to perform different tricks. Pets may be animals or other creatures such as monsters or aliens etc. The pets then participate in a Pet Show.
Level 1:
Design and make a pet that can move in a straight line (forwards and backwards) using at least one sensor for control. Construct at least one feature that makes it resemble your chosen pet. Your program must include a loop, 1 sound, 1 display and at least 2 parallel sequence beams. DO NOT USE A SOUND SENSOR.
Level 2:
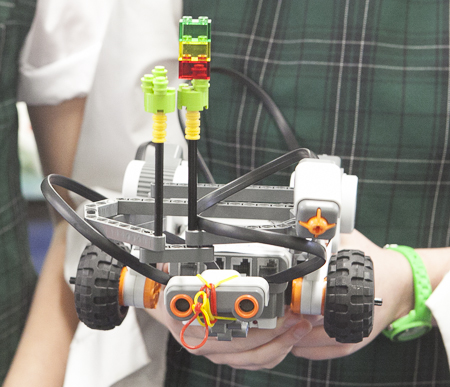
Design and make a pet that can move in all directions using at least 2 different sensors. (Your robot will need a swivel wheel or equivalent to allow for easy turning). Use lego and craft supplies to add at least 2 features so your robot resembles your chosen creature. Your program must include a loop, 2 sounds, 2 displays, at least 2 parallel sequence beams and a switch. DO NOT USE A SOUND SENSOR.
Level 3:
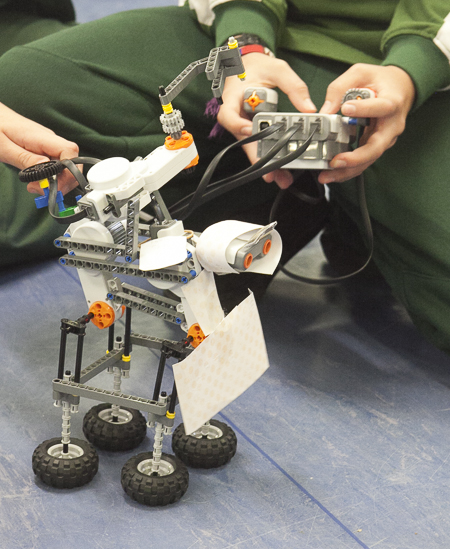
Design and make a pet that can carry out elaborate actions such as tumbling, begging and spinning etc. which are controlled by three sensors. Your pet has many features so it realistically depicts the animal of your choice. Your program must include a loop, 2 sounds, 2 displays at least 2 parallel sequence beams and multiple switches. The program should be no longer than the computer screen as you will save the various chunks of software as a ‘My Blocks’.
Videos of the prize winning pets are coming when I get back from LSL.
Thanks for calling by
Mrs Garlick