
Dear Bloggers,
Last week John Burfoot came to GEPS to teach Gifted and Talented Robotics lessons. Please read his Biography below to see how lucky we were to have him.
John Burfoot
Biography
John Burfoot is a part-time primary school teacher with the Catholic Education Office in Sydney. He is currently teaching at St Therese Primary School in Padstow as their science specialist. John has designed and facilitated a diverse range of science programs including Electricity in Aviation, Sailing and Soaring, Earth Science, Robots in Society, and Food & Cooking. He has also gained recognition for his mentoring of student teams for external science & technology programs such as the CSIRO Science Challenge, RoboCup Junior Australia, NSW TechnoPush Challenge, 60s Science Challenge, and FIRST LEGO® League Australia.
John also has his own education business known as Sci-riffic®, which specialises in the area of science and robotics. He currently runs training programs and workshops for teachers and students from Catholic, public and independent schools. John was recently selected to design and implement a Unit of Work for teachers on Simple Machines using LEGO® Robotics in the context of Theme Park Amusements. He is an authority on the LEGO® Mindstorms® NXT and WeDo® Robots, and has presented and spoken at numerous educational conferences, including the Association of Independent Schools of NSW, ICT Educators of NSW, St George & Sutherland Community College, Macquarie ICT Innovations Centre, and the NSW Priority Schools Program’s Equity Conference at Darling Harbour.
John holds a Bachelor of Education (Primary), a Certificate IV in Training & Assessment and is a qualified electronics technician.
Stage 2 Gifted and Talented Incursion
Twenty students in Stage 2 used the networked computers in the Computer Lab to send and receive messages from computers to robots. It was lots of fun watching the children write programs and then send them to other children’s robots. In class we regularly download from the children’s computers to their own robots but this was the first time people were making other people’s robots carry out their programs. Very exciting and powerful!!! Mr Burfoot showed the children how to record their own voices and then play them back in a program and the children programmed their bots to carry out their maths homework for them. (Clever!!!).

Perhaps the highlight of the class was the children designing and making their own interactive game and controlling it with the We Do Tilt sensor. Using Scratch 1.4 (2 is not compatible with the robotic sensors) the children designed their own sprites (characters) and imported others and transformed their size and orientation. The children created a plane and their own hand drawn (computer hand drawn that is) clouds were programmed, using the x and y coordinates, to move down the screen. A flying obstacle (eg witch) was then added. Logical thinking and problem solving skills were employed as the children built a program to move the witch diagonally across the screen and when the plane hit her a sound was created and the words ‘game over’ came up. Logic and sequential thinking were needed to program the arrow keys to control the plane. If that was not enough!!!….. The program became even more sophisticated as the control of the plane was handed over to the WeDo Tilt sensor as each of the 6 tilt orientations had different movements assigned to them.







If you think that this is amazing……..WE DO TOO…………It was AMAZING.
The children continued this activity in their regular class time and presented their phenomenal results to the class.
Great news we will be doing this work in class with all the Lego Robotics students…either in the last few weeks of term and DEFINITELY NEXT YEAR.
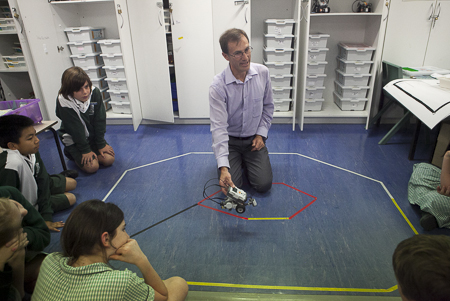
Stage 3 – Gifted and Talented Incursion
Stage 3 students calculated the maximum speed their robot could travel using Data logging. Their car was programmed to travel as fast as possible over a 2.1metre distance that was marked with white tape every 30 cm. The light sensors on the robot detected the white tape so when the data was uploaded the students were able to read the time from their graph. Using the speed = distance/time formula the speed in cm/sec was calculated. Students predicted what they thought the maximum speed was and they all under estimated just how fast the bots can go!!!!! Ah we have speedy bots here at GEPS!!!

Students were taught how to use Blue Tooth to create a remote control that could operate from a distance of 50m. This involved paring the bots and writing programs for the Master and Slave. The master is the robot that tells the Slave what to do. Here is one the programs.
The highlight came when the students used the Blue Tooth controller they created to race their Slave Robots around a racing track.

Below is a video of two of the cars going around the track. The top link is for windows and the second for Macs.
blue tooth remote control car for blog
blue tooth remote control car for MAc
Back in regular Lego Robotics class the students presented this to the class and continued the activity and we had inter class speed rallies. It was so much fun.
A big thanks to John for the highly professional, very informative and great fun day.
Watch this space. Lego Robotics at GEPS just gets better and better.










Thanks for calling by
Mrs Garlick