
Dear Bloggers,
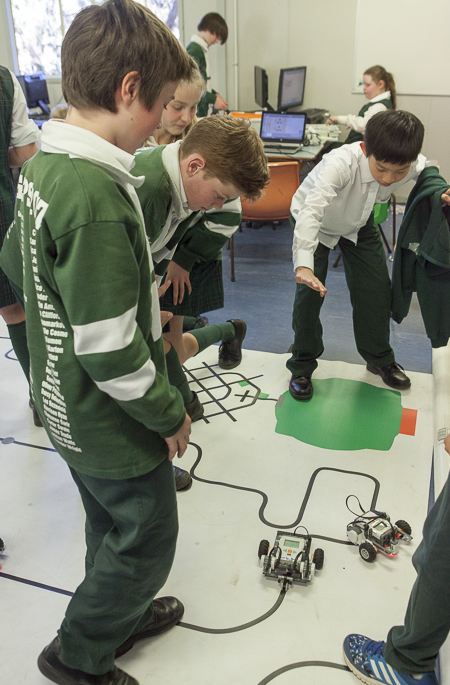
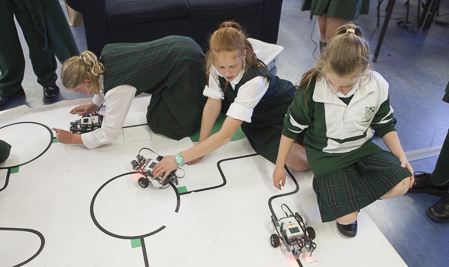
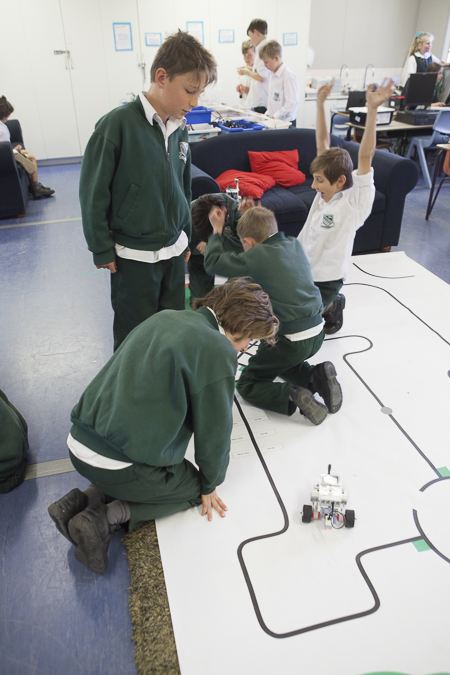
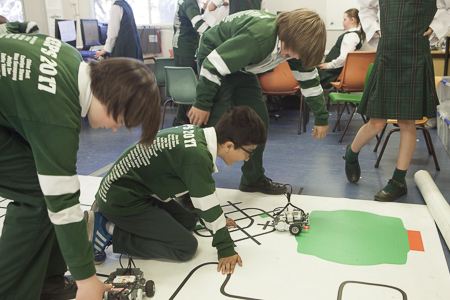
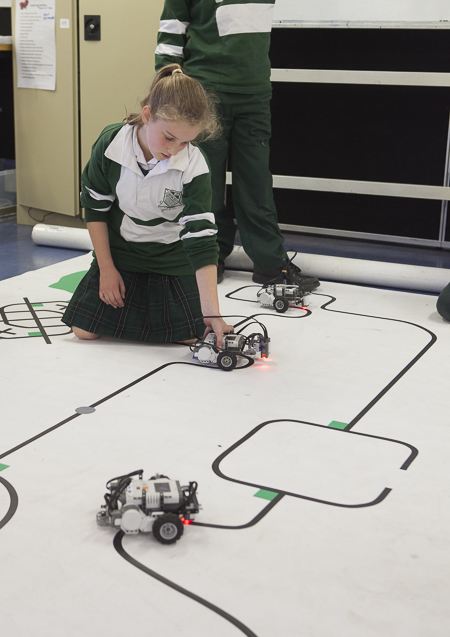
Years 5 and 6 enjoyed the challenge of using light sensors to follow the black line on the Roborescue field. Children wrote a program using a switch. They used the view menu to measure the percentage of reflected light from white and black and these values were averaged to calculate the threshold needed for their program. The black line, however, on the Roborescue field twists and turns. Students experimented with many solutions of navigating such a field. Robots moving slowly had more success but the trade off for accuracy was speed. The ideal height for the light sensors to give the most accurate reading is about 4 mm and students were challenged to mount their light sensor/s accordingly
Using two light sensors and embedded switches performed better but the programming was difficult. The sensors were built so they straddled the black line. But there are even better ways to program the robot and what about the green on the field that tells the robot where to turn. These are all challenges for next week. I am excited to see where this leads. I will keep you posted.



Thanks for calling by
Mrs Garlick